Qemu基础 - Timer和事件循环
A deep dive into QEMU: a Brief History of Time | QEMU internals (airbus-seclab.github.io)
QemuTimer
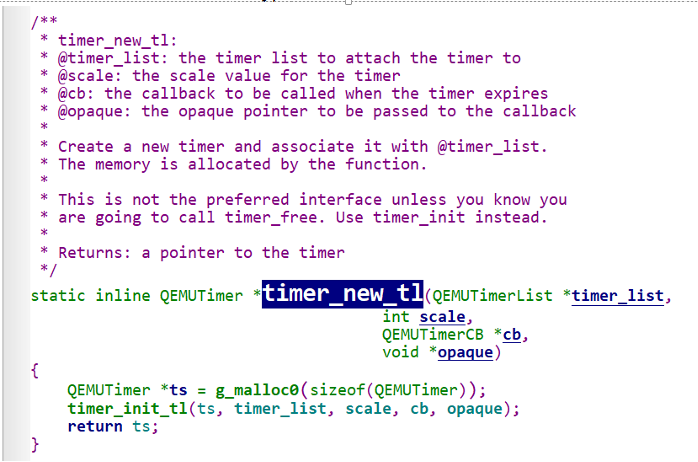
先来看看QemuTimer结构体
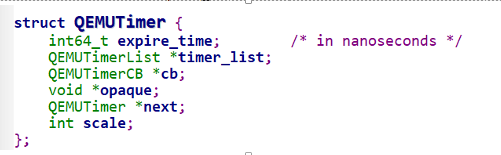
expire_time字面意思是过期时间,实际是触发事件,这个值为-1就永远不会触发,
timer_list,是按类型划分的链表
cb是timer触发时的回调函数
timer_new
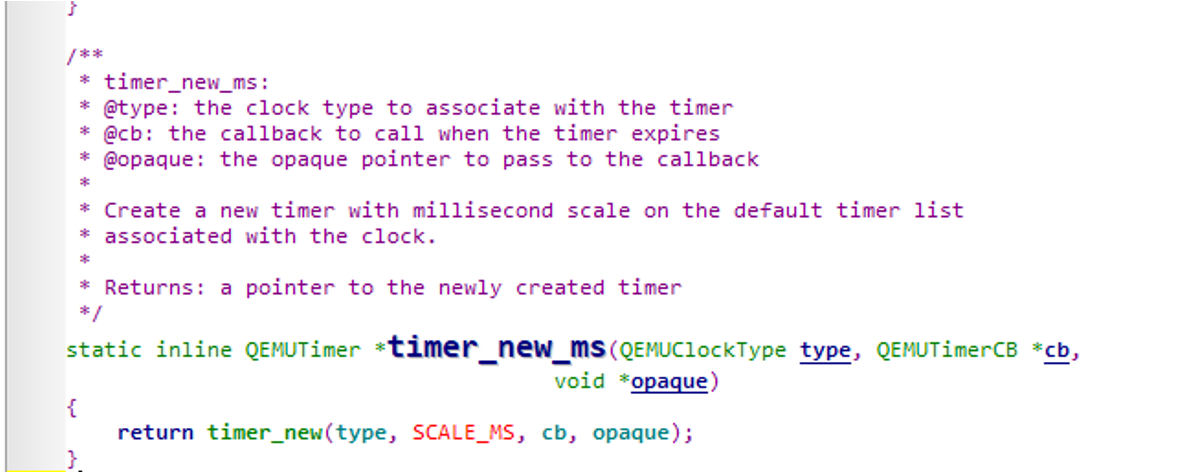
Qemu中新建Timer用的Timer_new函数,ms是其包装,指定单位是毫秒
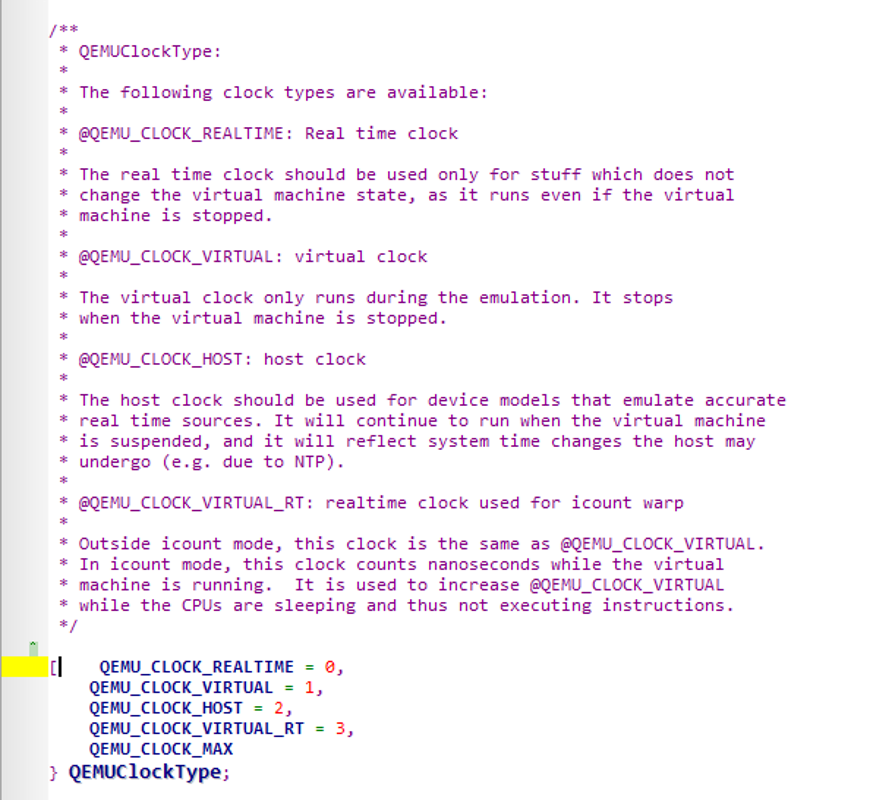
QEMUClockType有4种类型的时钟,最常用的是Clock_Vitual,反映的是纯纯的虚拟机上的时间,因为虚拟机运行在物理机上,而物理机上由于存在调度,所以物理机上的时间是大于虚拟机的
TIMER_NEW_ms的第二个参数是回调函数,第三个参数是传给回调函数的参数
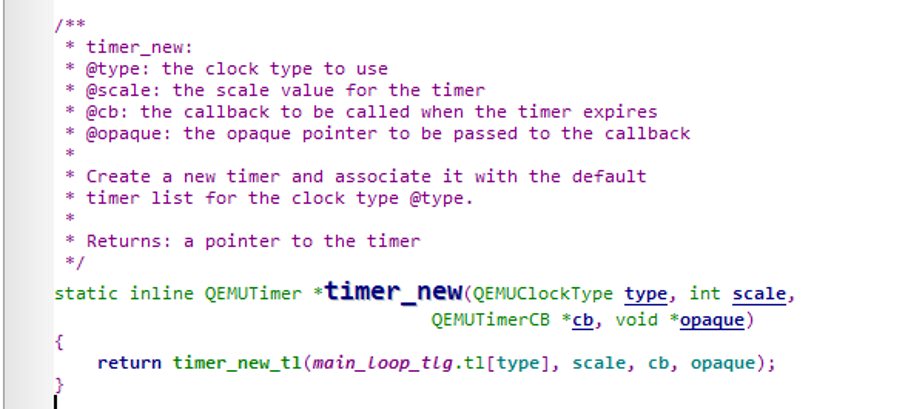
接着深入创建一个Timer对象,timer_new会根据type选择对应的timer链表
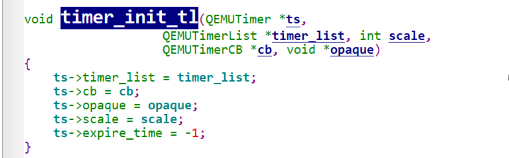
最终这里可以看到expire_time被初始化为-1,因为这里只是初始化一个timer,还没有设置什么时候触发
timer_mod
要想开启TImer,需要用timer_mod函数设置expire_time

Timer-mod的原型
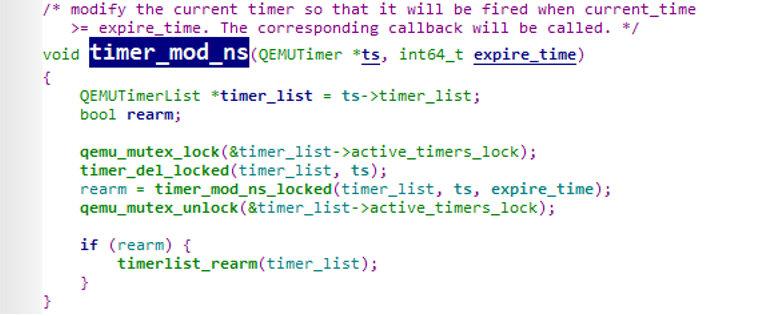
关于Timerlist的初始化在后面,这里只需要知道,timer_list的active_timers挂着所有的活跃的定时器
并且Active_timers里面的元素是按时间顺序排列的,最先到期的元素排在最前面
根据这个知识,我们再来看timer_mod_ns_locked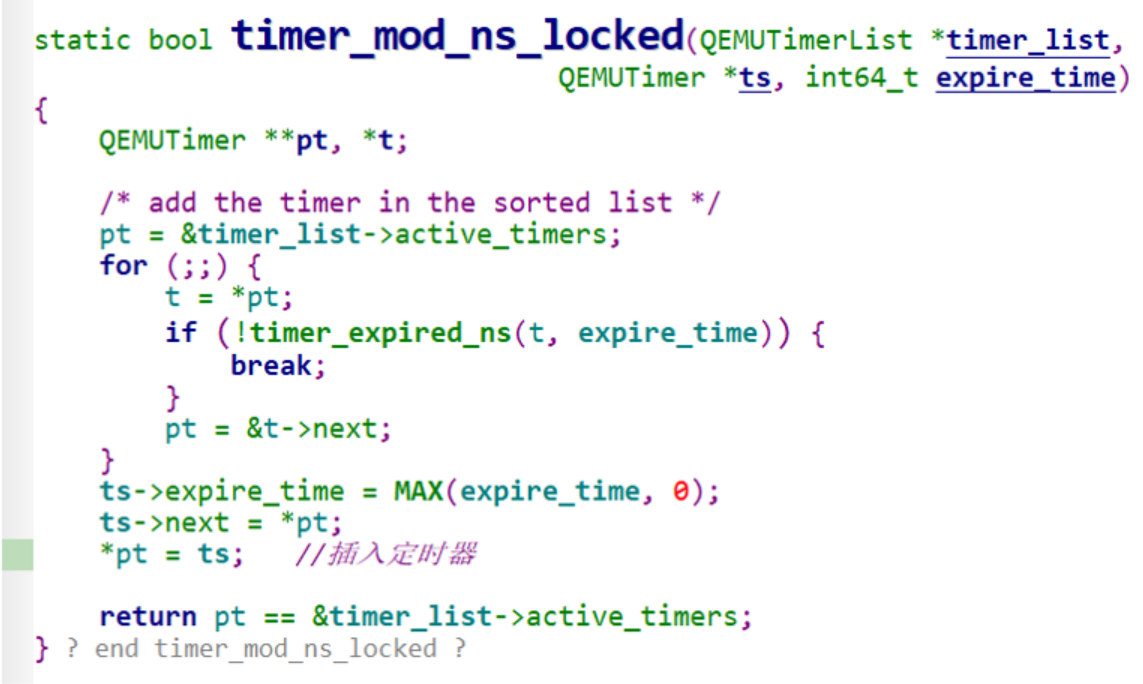
For循环就是寻找timer的插入位置,timer-expired_ns时expired timer比较,当前遍历到的定时器的expiredtimer 大于要插入的定时器的expired-time时就返回false,导致break出for循环

timer_mod_ns_locked最后返回会判断active_timers的第一个timer是否改变,如果改变就返回false,标志active_timers列表中最近的到期时间被更新了
总结一下,timer_new的时候定时器根本就没放到active_timers列表,到timer_mod时才上列表,所以只有timer_mod设置之后才会触发
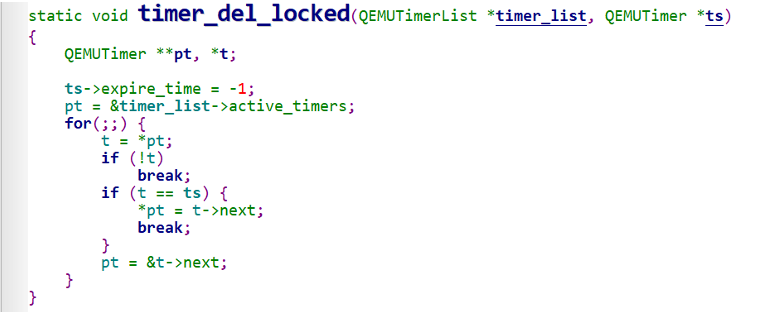
Timer_del
Timer_del_locked是把时钟从队列中删除
时钟列表初始化
在qemu_init_main_loop里调用init-clocks

初始化时钟

MAX就是4,对应4个类型的时钟
![. qemu_clock_init • static void (QEMUC10ckType gypg) QEMUC10ck •clock = Assert that the clock of type TYPE has not been initialized yet. tl[type] NULL); clock->type = type; clock->enabled = (type clock-nast — - INT64_MIN; QLIST_INIT >timerlists); notifier_li st_init ) ; tl[type] = ? false true); NULL, NULL);](data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAA14AAAFGCAIAAAD1oNl6AAAAAXNSR0IArs4c6QAAAARnQU1BAACxjwv8YQUAAAAJcEhZcwAAFiUAABYlAUlSJPAAAH8iSURBVHhe7f1Pb9rA+/+NmrPrnpQnAJXclidglFZiUQm6qaKKbXeAlEXYdFcp30jddQOL6AusftmifFA3gR1Si+InQFtLhfV9Do3v333O/ee35cw1M/6LjW3+JCS8X7ISbIbxzHg8fvuaa2ZSi8Xi6urq3bt3iqKkUqn4f327q/8+e/aMfQAAAAAAAPvM/0v+BwAAAAAABw+kIQAAAAAAkEAaAgAAAAAACaQhAAAAAACQQBoCAAAAAAAJpCEAAAAAAJBAGgIAAAAAAAmkIQAAAAAAkEAaAgAAAAAACaQhAAAAAACQYKG8gyOVupCfAHj8LBbn8hMAAIBtAKshAAAAAACQQBoCAAAAAAAJpCEAAAAAAJBAGgIQSH6wOF8sb9OiJgPcK9XBfSYg0xyc8tOdDqoZeWyb7Dp+AAAA6wNpCADwoDU/npXS/GO61PnY3LYUTRh/RqsWB0xKPpAoBwCAQwPSEACwt+QHi/pt57gkpSQAAICdA2kIQCCTcuoiJbf+UB48CPTGdWto8o/msHbd0PnH7bHr+AEAAGwCpCEAwMe8Ub7kmviy3J3LY9tk1/EDAABYH0hDAAAAAAAgOVBpOBsXUhepwn73E95PIsnHf3o6FaNf+aDR6bQyGFT4wUpVhnLQtLwnPPs8yGueAQLW2N5Bnj5PZUgWjL6kn3uPEJmmdXB5tMHWB+cGZHlQrGpbGSrLx0xMxfBbkWYRufw6kE3SozVd5wq6XnGpVlzxuLbgMneu17RJ6fTmmlcJEdAmfvxa0VUUJyV5VFGyx7fOcdrEqYMw+oW+IT8DsCNQzcCT5TCl4ezmN/k36ZPve6wNkyTSqDERWUvaSnGVRj7+2XRWHmKks1m1VFK9BwWZ6uD09vbE8xX7XDq5vQ2cheSoOWWB5Q4LNmjmB/Rz50j40303aEzBBGW5dNy53XgoLmkaPmYi6xozQeXDIg/RMRump1q5PbPPZbYKva78fJ88p1rhyTWvEpvo1I0wx4XehN06M7n/eBjWbO9Wtu3inZDVEfa2OX58RbOPsFLUJ70U1CF4guydNJyNC4WL2iaNYowYsu9f0VNXy39wbBJ7x44TyXSMS6XFoTqod0IHiqZLnfrApwVKx2fe+EtnLiMQR2byfqAsMwUj97YMj3xF3Nmzul8dbpqe/KCjyo/0zL98kPEc2bOTkFqhdhyr8P1h1C5HeqY4PVH9BTsbjmtMGAnhVWjX5EgYiVeWWZv1ujVrtd27HP4+lpJNDf95u+XVXPxXvoPmsNVnDZSMv9C3BuTsA1w4ioQtbYXW/qSTwy9nO/kL8fbIqifTYkaZ9B4wDQDshr2ThtM7fcMHXJwYRN8Uk0Zyfy/ZZSIzzSuXjpkZzjOTPcoCZXW10rETMrOfse1Cy2kWS5+XOx+XzRTeI9n0a/Fh5/iy7JIJLBe18XB2J79aB0/ks2GfXAF4zDXXEzV75jYEbpieDFlk5WcmTDbWhd2edXa2JTdYWVWIpdy51rkjJ7vx49dHucCQwsHCteUaS0NYhv1elxXNxyWRzlRarjzq2oWkz7vly/hyZ/qHn6prOMkZGslNtKyQLsuNidNA6ZNG+acdZ6kju8r9L1lgCfPmK7ucDz2GKXv8kb3vdXs79voB4L7BMJSDRHv13hEy40Ku5zwzlfkf+cFNpvnZMlBRePsZO9cbPecBm1UrPm04/EmSRb+byn32iOaTlbiO3BPVt44Jc9hPOVlgzPXuqJzrra+uvJHnytSfyZl3G24Bkn5fsQyHm6WnOqjbP2eqp/wQHckOTBdaVUjv/r6xteH96X6BOf46UbTiR6eTXTIbfyIZSQ4R0k2RGzRpFh2PSW9pBRzHLMvKPF9VHO+O4feJVl3yqFzJsMYLiTvryvinlWb1SH798KTPbu28c3cAl4Ooy3MBuEifvWVVafJ1vGdGVQA24p6lobdPx92ZIntnUuUJ2+mWrTAUzGNy8nbHuHuFYsUQz5uHn8UK5rGDRCB6ZPz9SvTo9/bIkF0pOBdEnETK7hQZJqGPmVZxetuG30bhCsTCJSWlC6QLvWdY+XVJH8JssUe1B+PbsqXnXqh+cPW9+lO1Kasj1xuOXcjuQN8kPa+bp44FlynRBypSC64L5WfG/M99q36L4U9WlTMVdUnDiDquNT/aXd+Wm+u8dxP/ka5+qCrd78JKbnzvZiofkqi62fgrlZLwtrWSmFXPOseJugVWNx2cJM0Xb5qokYnVxsVo37htlz67uhbcpnOB+0FQKMQ8O0d27acsM7nLGi1SYAXwd+TLznLe+StaWBY+zMDP8ZdjSCrVN6wm6SPnJgfg8XOv0pDsKe4+HU9nShxmrWtvdwz1Cm3kmBgAa0N4p4/cVfTu6NNS0xaCkEb+583wO3v0Zyrv5fOA9235c+EWjpGwBo2X5LqS4PUL++nJHnHy0ypeO4Mksmd125Igt1Afu7s/diYfmMzLnPykzIzellPlijw4y//++h8qG6Qne9yxDTjsOczfhADD4LfZK+s2czD//mJ/81+8di+h0l3vNSsQMSilD3nZpzw0uux1qURW0V9/Y9254pVKa77ZxD8kRtORpPmS1Sc/WMT0Ol7RvnmLt3ftsoP7TOf+B4GuT8q5Jbm5NtbblzeV8i5z9X6wEzcuqTTlni+VAeVYzgW/pqffv2KlMpEvDQA8Be5TGooWxDVLibszRe2Ig7yjx5muhG0e4fG82qzYU1uIXiHrPT5WDJHePLLD0zPFSjF+t1j27C2L2Pu84erL7j+0+raarr4tekS5TEtRiTS+UYPuxMBKMpFvklvKHAjPX8R69G3MzOQaIpItpee+e2z3GZOKXnu1NPpEynXtyF/pAwrPvQIObf7XzpJa5TqfepNdlvc4cG9F5/1wHWI0HQmaL+4YorOQ7gmCoghv31R3JDp7a7XSwBLgleBGTehRJ4UsF/PGt3jKyno1PZVuu8t93tnjL7w5dKdS9o24HWkEfIoAOza7KGU52mUtW9hJOXDESVYlNfrLDFHgADw+7t3XcNK7sW7Y5J0pNBryzGmRs9RSbxfzpscaX98UKy4zTTTU66ToLocr7q5u9x8K4wG5irn6tq6obyvuTDqz1g+K0BWDkugZBXbIPWg19kh3nk9qZ0tzPT5+7u7YjfU6vXynxpXrcWB397x3M6be5E1E3lrEaDpiN1+2Lkw8yi2wffMY4wjX/AcsASTV7J+I9nDgTuEJBXAP8dkQsu4ynFTKvpHqF2//BuVfTBGQPvvCfyIN/KIcyQVBlnVW/UwFTfrPzriLNN32+t0mA9kA2CvuUxqWOpWqxl7MejnuubHWrA3msNa23T8S+9hFww0M3jfgpPB2yenNELZSewIabjzwz0eTffGc/Y3ZM8XZyPDn9gY7eplQWQRP8mFtO/B724qN09WluzxWZlOiytNtq5iSgNk0Pd2eY87KHt8+xBwxj4gEct0/DMVx6bRgd7feGFFvsnVJ9T/3pAhiNB0xm6/fn5guFApSHkkAn4fAbt+4o+yyMc7lgcLIveSyijP7+4/99fiCpy74MKplt4u1kTYDK5VyMPnyNGAuS7IcTS/uZekWojfEco60yZbt/sfPAfAQ3K/VUKWpf6kfOaN3R7SMarKlPrj7R3fO79rdsBUDQ+lNkylg2ZtB76sbOhj5kPNobIJLhKZfeJ+b1YFriION640+aIaareJ5kmfcQ3E3wO14RBaC7WbBXZ6W+cHBM+iHXhQYm6anW3bdOaUTTHYSyfIzXdzsXhETAkkF7SX3fuGqI2lvMoPLI/dl3wFxm69XX7it8et68/HxdxnZvnEXPr8xbg+QRj6RSnHTbbcVBuBpc+8dykqW+pHJXYRGCOqTr0Eu0sH2MzERinQOEVuoj10SC5wLIUuCOw3iw521RW8G721Z6nvy9x2LN2nX4JBViGeMZxiofCuOjdsLp9SxvHa0fJN0YWAiXCnOHt9OK55l3LSMVqXfCt/PtXDnx+q7YemZ1gN06lq4s8y0FM+C3GMClK/zVnFNOpgMt7cXi1y4gHEy1eapa9oP2bHF2Dg9k7Jr4L1zEZ8abvPq8VVzhYY+IrNPoL+XsOT6bzo5bFkIvgSQT/PyTC4Bd6X3LU6Y9zyXfR1WNh2xm6/cWX1A7+euiacS4LRvvI87ck5+0T0r3Wt5ObjWxXS2rbwDWsjBKJRKcdNFeABYEy+IPgpp+/euQim2QEOr8HM92p9piADYkHuUhmarRrPVOC29GCHo647hdn3WgIZOZ/A6nRMtyMxo1cjrzk9kDKsQnjSjXMGZqYDmWUjYgPKskYWA3le9vS3CDYaMPk78fe5dHtnCSsQzpvtVCANz2GqL+XqSoI++OU8Yazaz2xPHe3EJj5kqq3ZuXeOUb+u3HfrtJi27NZiIkJ7mLD1bfFbo3oGalAUr/XJ1O0/D7n0quJ4HnpV87VcTzysOXyZOBKi7/bxoXjv5MXF6AvDEwC5isrFIXnzP6rD8rj0X89rxe+xs2TO7YGnzri4j/L1+B0gvacntltuWEwvdNbwT0z9seW2su9J1X4tT2Lc/70zgbYtrrhZqxMZesRdKjKYjQfMlVi/SfWOH48EHo8wb38ZM84UZ46zzm8MaH9Fhd3NT+zxvfGK5SHxeN1Z3RzekoZd+GvOGmFlpuc/bBSsjXo52MDkJl964DpocaImZQboyyM8VgEfKvVoNf00a5UtnpQPyd3HP78YRL776qJyzgtnGEeEN0iVXRf7zXqPrvJQ7rIjBnvtQerdYAxI99hf+hHX9PFceJe5l5oPk9D8/2fuqv7dF9v5NXPFPdOo4tR+XUYm0nzF0/LLM2jQt7zI5xYOek4FNKntYBbeGk3Ki+ceS0v0Rkh73qIuNWO8xGJOoyNkTUlxOh83T452y+WEWpts1ZJGNV+tU7uT7O6jLVtwyTCeUhfMYv2vIe8JnA/KPUJbLsIV21HLrkrDSybvSdV/TKTKu2z99dsV9MVxheCNmvxtH3viRTUey5kvYmlk1TD7/F9eg3VFDDzHG2a00K2pqpV1rOpLxl/qLyjnHkY+2pHe5HGviKg7v3eRx7Qju87bW3WFlJEyG9gJFJH55jenKGhN4Col585uy6HuSAfCYuUdpyFpGTz+kxmc3WOowVDu+7kob6sks2hqI/zywzy08hljQz5vVjB2xVi1eJTctUMPVnXSDbIGsRR64esZ4RhJ1nJKFqCkzmNGqlentm5d8JxHsfbpda7mMLDM+xWuu90cJyS1/pvGpXz1dVjO2Oxy3au3N5tgLSg+Lk79AbAv2GKRpgtlZPBmg9NcKYrqK9ZGRD0135Kxw+MS57Akpj7jZOD3zxifntYb6sj2GtKcBq3WiiKJkdOkNDZBo/AzQGOyWOR24bmrurRAwymQD/KcIuK+5L4anbSEnjgQucDGajkTNl7Q1s/fEpOpQCrOVxjiOcI7wSHBaTnyQ15yLsR5U21fGYk9goRU/R5Qxb0Y9Xdpqx1djQjGNHns7L8KTETwlUovF4urq6t27d7STSsX/69td/ffZs2fsA9gH2Luv/BRCdWA/M43a9geBA7BNFotz+Ykx7F+UJ5nmaT1MDfEaXa14VsADazDsp8oTV1NhIabF2Y8Sls2X5vH3JaQJn6bY2XQEjdlqXzbm+cG5zwANwKPm/oehAADAbiidVMgL7tplSvXCu4Bp8h9ugiRXv0STJACClpcr02rVUca4B4Rd2oLwMlyn0ycus/F1Y65UK9CF4IkBaQgAeDqonUpemY9y/eChwPaQFO5CRq5+W5xO78kjvSGFj6PtmLdniGWh2aUlf4xdpnJm9HOjuVY8hQkaPDkgDcHjwj8rceT2FN3vVoDyUU8WFfLHC1EENLlQUbqo8fmRXA5mIBbCx3Hfy23nqWQxa/nK7fHObJIAPBjwNTw4HrmvYbI1XxmzVnsHa7TsLQdXPkzdyk8AAAC2AaThwQFp+KSBNARPmcjm6x5AlQNPHkjDg2Mf2lYAtgWe0wAAsF3gawgAAAAAACSQhgAAAAAAQIIOZQAAAAAAIIHVEAAAAAAASB5GGprDfrtwcZG6uCiMoxZGBQAAAAAA98RDSMNh/7I8mdNU9QAAAAAAYI94AGlofJ+wv/nm6fni/BxTyQMAAAAA7A0P5GuoFd/sbslzAAAAAACwFhiGAgAAAAAAJJCGAAAAAABAcu/ScDY29mxRXgAAAAAAILg/aWi22jRbTW400fLFK4w+AQAAAADYO9ChDAAAAAAAJPcnDdNn9fPF+emgmNEno2+GPAoAAAAAAPaG+7YapkvHb6uK8svEIigAAAAAAPsGOpQBAAAAAIAE0hAAAAAAAEggDQEAAAAAgOSBpKF+dyc/AQAAAACAfeGhrIaTHy0DI1EAAAAAAPaKB5CG6udiRlHmjd5l6uKiMIZABAAAAADYEx7Capg9/jgoZjS5BwAAAAAA9oTUYrG4urp69+4d7aRS8f/6dlf/ffbsGfsAAAAAAAD2GYxQBgAAAAAAEkhDAABYD6Nf6O/lop97mzAAwCMA0nAPGdYuUil76w/l4S1itgoXqcJ4Jnc3gaKqrZPE2bjgZHIn+Zy12hTzdvJ52PAK47pca13xlcjq0G49notljgu9ic6SLvf3CJYkfdJLQR0CANbhAKXhbDiu2c+5Qrs29IyR9soya6vJJlaKDWuXY9R4GPGw5D/3P974r3wHzWGrX3CS0W95k7H/DFui6NIvXosD5rD2mJ7r4ECZGa1au7D5m4hRuxzpmeL0RM3KIzYzY1xrtx9SmGXVk2kxo0x6nqYKAABicWjSkKm0XHnUZa/6An3eLV8WWnFl2fTPnP51Dee5MjS68lN8jFrhstyY6E4yJo3yTzvOUud8saBtUJVH9g9T+aPwojP+KpmXIkdd5c80vsDNHt/yTE6bGXkE7C3ps1teJ6fFxz6zwOzmR6M7t++8dRn2e10l0/x4vKQL2b1x82PUnfOW4gHJHn9kd1a3t4teBwDA0+awpOFs/KnBWuxMdXAqtNd0kGeH9ca119yVH/Bvna2jym8Y1XxVmXy32tvh94lWzSd6Xg5rPdKmWn4wlclYTCvN6pH8+nGQLnXqLNmvez32oG2Uf/x6XZku6p1SWn4PwNPFHH+dKFrx49leV/f02VvWvE2+Yu5YAEAyDkoaDr+NSJI1P9oKJls64Uaree8mfvOpfqgq3e+io8b43s1UPiRRdbPxVzIz5ge3J6Ws9WTJqmed45LcicVs6O6P9neLc3iftQiQuijUVnrcDfs8WH+YsEf45Wtp8nv9Uvz3MTNqBd4HT1u7UDOSxS87/6w8FILSF/8UtnfjfXsfei4WS2PB36HpdXJwexdwdwWWJ+HJQG4J1HEvgskY5LVz9ebbV1Pux4RijijsVfh8JELqZNxT2N6Nsb0URK7ZtaUaYZ3CrvbWxc/RyyFjUua78if8kOUcQmekSya/7S8lYPiTNSSZiuoThrNxO3Vxkbq4tE7R47u0ian9rQBtbzeF2WrzYLwDetiX4WdGvyB/3q751Z05HNvfXhT64xB3FPUNa930kdMh4cWosRO3YVYEAPg4JGlo/v3F/ua/eF/1s+9faYqi9+KIFhGDUvqQl33KQ6OrvXpfSr9WlF9/g1tnH7Ob31yevkkkBH3wbnF3f/Rytzh7svI+a7mr6N3Rp7B+c/bULE+4rZSpVXksCi5Qcr2e8rZZVaqDt0qvl0v51AB7Vud6Xd3uWZvr3d63+M8hlqwc2SSdPOiTco6dQ+4SCU5h1HL0ZkDW2tugbsBdMaxdeC4WS6Pu6dBccnKYNMqXnlx2e5agmTdyl+Uu/8wKY5uOZEwVUcyewv4WP36rvjm/53XS75Ub9xTD2mWDwmWqg/pZooulj3JUI6y97iiX+EVg/udbny6Z2GOXI+dVT8Z3drdkXr1PbDLMqtTWsBP03KuEmkaPLmim+cbpm9BHlzk+xIUz744uXetGMSl5WR657u3JqHwZLPDS71+xd7eJfJH1YRhUk+YwKwIAfBySNLz7wxpT7Sgndy2yJOy8uCwKfPOPxyypVeXf3xnvTa4se6GvgnsrZirJHysOVrd409UtTuq24RgHZq1rerJSn7XsE58OikvZ5JAAG+ksJNOF8lAcWPqfswTcdo4Ukstq5/Z0UFVe5px8GTXSm+5EnLKEBhsXAzBbn7iSY4pV/Hxa4Z6X8+5Xl5En7imYculxn1BureWH4iDNb8tbAlNWmZ9Xq1am/EIsuA+Dg7ya7G1BBKBiZHTL3mc9+7nl56c1T2Ukv8yEoicUcnKg/y5fC1besS+WrG8smfLnMhd694ddUPFPwbSyKDSmCzvrvELJW0N6seojelnwu7a6nEaW3hS63QkVOPtKlrnjQMIwTVbjtVfL9332uL44P1+cn1qnqPBd2m6P+Y2RPv7CL5z+23kT5SZIluYlqZkpDk6d2Gzb32x8zStMplk5pchPxX0xKQeOehFq9JcZJP5UtcqizuS/+M2fAIAD54Ck4Yxa9C2hfqjOezdj6k3eROSthbA7kjXF1S1+Rc8P+wFm3pAdQvRZiyMszHFn2TPK1oVJ9JKg1DmxE8Ah70PHwDNr/RBCoHllJyLNEnoW8zwzo8e1BtlXxc+zakcIIv33DX+uxj/FjWWDak4T53Mz2MsD/dOKV53gVwhxNSnAmQiQLn0WcoTePSwyzc/2z/1m7y0gnRy8vhasvM9cLrarEPWNcvFZ/pxVBqnkpatG/FPc9IWJlCng9XShfWtkz97yNMS16Dtoxam4XtZ7ozuGuzt2xV6n17sIJZXX4flvy4OFmyDZ/fzWq08z+UH9mOdCeAwy/vE0mDe/eekUP54JRZcWi9Kz7wNfFNKUA/3uTu56UDv180X9xLoeAAAgOCBpGGAdDMM/DGX5EVX6kNcbI+pNthp0/U9g67t9uN0x/8GbpOyL5+yv9QDj9tGqGvVg/f2JuljX0YUuaOxqwCNcjuV2FVAypvT8ZU9Ij/TOHXHRNP8zpX9xT6GPGpYqSdY3yS7zibsauLaYvZzSA4EJibDgMhP6KGebJEW/t5VLzvMX9u+Xzd6bE1jYCeD1jSXNY0E/eskvlrwv4p5i3mhYYnpdBfzSKSBvGmLjyoja4Vf8dmtyXFWlZBZ9yoaY4CD/wS+RXZf5yKr2lIs7q8JcCkdDtuVG/ND8zqkwAACwAQc1DIXQl9pPYU0Mf3i7oEeg9pIPOqE+Zd+zMBa5l+wNP9Gol+TEtY+++sJtjV+f+NxnWr4qBIKrxx3sKZkqdXKS9EnglfqokEY+0ac8NEgIa8WNXI8BAGC7HJI0FCYEj9sQQw5bFoIvAWROWLYlCOXnsvcQ0jLEEea9eKNeVuDPxezvP/b39QueHmEfjeGIljurD6oZvduLP7NjXHhB0ANQdP4mxmsgFMjOVyUj7EKxT3H0+dbyx0o4JGFzX8MlxJWykZnQitIT0bWt1Z1KyF7s+FiFve4bS5BxzvYIEHdW7FO8/MzqJH3oltcvZIkvDVuCG/GCvfdiIQejUJ+y6E1eHuvsYWZY1Z5ycWRVGO5o6NkCjf/CM/JomwUAAHjqHJI0TJ9xH3B65MiBtOZQOrxvzX9LKL/uV2dWDulTb3d7lt402YNBH+XcM3fQJC3jmFYSGh8thinYpxj2+VAGu5eZptfhpxi7woxrQfqv1KEnsd5IMO93LMTAb/YAbHyyE2qyhAYmIoCsWuG/d/I5M75xHzS7KJOcwvZTHOXu00aafl/hD3JrNAYNRhaZsJCZ0Eefkk7sY+OoaJZvu0onwSpsvXFtjzGnKWBWT3jkYGezZ/3cFG9cTg9yklPYfor+ocGJYPeUHMjk6cUWdyh/uVquJrEQ3nuugSR+0tYpjOBTpFVeXPPGJR+Ys3Ks88wYfxL9xTKYGHPMKsx1zT3MOQyhK0M8I8WsOctT4wAADpzUYrG4urp69+4d7aRS8f/6dlf/ffbsGfvw8NAUG2IopZvqwLHQDGsXAU/WaoVmveaDNpTm6ZKxkEerFKc01DHwFOQa7xiBxOAPuWNjjxE2aikxltOLJuInghLpPUVQJJqTcneCrV3dUw5bYFkHMexEBH5L2Pkc9gv2DCIOmebUcfSLdQorQrvUtpzPlQRfa4YzJHxYY2JuqSRkqsV15IHlmCF+fNhPlWnSZR5mqcppGY3mx3FOEU1gOu1LEZoL+2oYtYIzZYyNq8rFPIUVocggQ9x6cbB/4sWTBmLp1rDTYH219BMfw/5FeZJpntbDAhn9VM+TFK14KgcpC1wBqpVzdwZ53PKzC/fZjFq7F1RhvKfg0Dw3jXl+EGhRNMeFS3FBQgIAAA6UA/M1TJ/RHCsZbr/gaPnmdLs6wX8KjWZW8c7BkT2+peVPPGGagwTuRqXO6aDpLMEScApF7fhOUV3h18/STHaabtk7aeCGZM/q00GxqnGDEpHRqpUEgwtKJ6yYvD8vsny6B4AkOgUrNTLY8nxu2lUZG7rWLIFyj+VALMDjptRhmchr9qVKTPrsipWT3KFT3L6NPeLKIqhODq6EYIqDmL3IV6W9AivRKeRc9GSJXNueze+LZa8Pdmu4q8walN4UNWXe+Blqf6YVjPOrTiEHo7AKW/wcIXwzWr4yPXerULVTPx3knXIMh0+ZGOrJaE2lAwAAXg7MamjDzQPxDRIAbAtp3Epi0gNxkAXrMSvvjEjDYQRG7YLbJ5dMfdJqmClO6/GFeTArTYaEORxfl0fzrZwMAPCEOLgRyhLuOG+7RpGrH5aLAgDEpHRSqSrzxnXSlVYI02i1eZd2pni11AW8NcTU2NVKoC4UXoaXpAuZlv4IXQgAcHOo0tAeknJJA05pPTb3DMMAPBGGNd/Yav+2TReCnbGPuVA7lbwyH+X6CYYPGX2aifCyx/1jdynJZkY/N5prxdOV3SK8r3ptwycA4MlyqNKQOzMNitLBizwO76ETCgDwdFBPFhXy+E3ecGiZ/GCnkowlicm+5WEpFumz+vnivH57omahCwEAfg7V1xAAAAAAACxxuFZDAAAAAADgA9IQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAICHxGy1L1IX7Zoh95OzDzFEcg+nAFvh4KXhsH+Rao9ncs9hNm6n+qi/ayOagP5Q7u4n+5FIo5+6YMmQ2y4aTarMF+2WKXd3jDnstwtOjva8Djw9HsWtdw88qnIwjd6c/Zt3jXXv/4eNIWYjtnkik0AP96d7I8SXKGEiZyUHLg3N8deJor1Ss3KfVfFxoW+wQsymn4sDM6NfGCd/qJpj8XRc57f3BGs6N5S/m8cQyaNIJLBhpX1Znsx1uZuUvb5YXGE7zz/PRi2vUaPPAY8i/ogSz0uWQdev6Ift2pgaHAfvU9baDlPqHczNm1YrGfYvU1VVcSAxETHEKMnN0xDJPZzi4dlxpU0qUZZFTiwOWxrOjN+6kv9ynJb77Ihyp0x6ufZ4aCraEWvT27neRLm7S6i4ZczVvKL/9rb7e8Tdnzm9wW3A5jFE8igSuRnqyeL8nLZKXh55vAirQKY4OOU5ou2kJL+Lw95frFWon4vsuTf56mumedPMyuRz4NNwPu+OqMHZ11biYXnU9SER6bM6u1nqnfUl0+oY4pTkBmmI24htns39Z7eVNqlEWRY58ThoaWh8G82VvOp+dGXVk9vz08Hz3+XRRB/1vv57zh5ytydJFbd585ti7qh5Zf77Zm/thgBsl7s7XVGqb49LSRuix0D2uG7p3fMBPQHzA2t3UT9mTUT2+GMzo+ijn24L3/DnSFcyzY8UwML54fS0UmV6cj765BWU1YoVs9wSKWwAwNMkoUQJEDnxSC0Wi6urq3fv3tFOKhX/r2939d9nz56xD3uG0U/1/jVP62f+x5g5HP/8yspdUbR88cub5M85c1y4HL2unHeO6INSPL31aXbTaP380ZiId4tMtfj287H30iYKkMlU337sqK5T2FlTxrXrUZdCsUg+dngyhv2L8oQH85MJKo0AYsRgttqXjTl7BL75278W6WSFeXXifkCyF5rxtx+/u/IdK6Pl315ZVXx/EhlR1PHgORUXgkWSb348CcgCXbUJ0wQBr9SmUbv+EVhQNitOMRu3cyPFVW5G7aLXJf1xmiAvMdKwKgsribxYPAtzzX8r8YxkilNSZvxqKuyzerPjq8ngCWY1Z0mx8RJQ8pXFCS8C3hTo9q5T5Vw/9P1k3TK02PTWk0Q2QauwrsXH9I0VSeC1CKtRm9/+Tho2rA+rAsTL5mrE1bdYuu4xTrEyhlglGZEGIrrCCMJqb9QpgtMpb22LeBer53FoCbpJg4jRwnDC07CNShuT2BKFij1Q5ERyuFZDs/VjomRevfcWGXXbX1yWfytfinnWWH9RfpcvL0TXfny4CTfz8ki6Viz1KRu1y56sWwT1KH3zeCYkDDCfd3uXy94Gf1i1uLS0AkVyed/jwjL/vrJ2zUqnPhnl3B4Y5vhTjyXPyaY+6XkC3A+rExmvqFdDjQ7lVO4q80njOkkHIsmLnr+gvF2QSU7BHjZCF7LWOXaDsTIN7OzSJY63/t2e4yS3LV/brPpKY1fHdysZBmXkrftJ/PvThfdqegpqC1czAvWEDIqTH3zQj9m6Huns4SR14T2y6a0X2QTFYP77kyuS5TRE1upt8PuTrxyS1YcYFWZ1NrfCPZxiNXvRVkddC/amwQOs5+gcr4WJUR92TBKJEixyYrJYLP7H//gf/xvn/835/3DmnH+cO47J+d85//N//s//g/P/5fz/OP8n5//i/N+c/4fzv/7X/2Jn2TPufmr/9V/VP3LP4c9/qj//TBeL6c//Vv5DX0///Ef7eSe+jMdd87//S/nvnywSBsXzX//ddEfw5z8KO7UT593g53+a7pREBRj8578owB8rwN2fKjvjf/1nIPdlDLT9988BD8VyQbs8RxZ/qv4jSVkRAy8ESsN/y3SyRNKuK5F3P6v/kckjlgMQD5zI6KKOhNc05xR05E/zP7J6eBDX3Z9SmUiNV0t+QKTBFTLqFK5KKGJjIcU3MYlIA4+fdpe3hPfOqsvNr4XnVuJH7GsRcDVFZu2fbOFqWnhP7UVcjv/8ETedtwREIp0fTtldwAvKuSL2zeveEtwCAeXgq9XRt56oiivaqAgi0xBRoyxW1YcotlAfogLEKOr4rLz9Y50iOAZBvJIMiyFWW81ZlQZOZADO8v0V82I5NYpV2qVIVsPDr2hhotPA2aTSxiC+RAkTObE4VKshdwDKf1h+mVdPOt5+E+raT+TCyT3x7QFB/F1k3jP8Lxbd38ZQHkuXjk/OllISHsD4PlHY64Jj8kmrnbdkqfjue4vLVxZ1aWrOqmqVH7tnqpW6TGda/UDuWf/+2iWRPu6cuCzhMsADEJ7I2EUdDjchu07BSKtn8bucxMCOfOXWrpYsDR+L7AXXngAi9il459Q8w0PKQ7GISoPjhMed0KsuP7lk985KSiqL3H0r0dXRim+8vUXUd2NfzTO6WPZPtnA1Y5E+vipmyFW8x17Zi1cBJTApW1bV3OWoS71CLFXyu22x+a0X2UZFEpqGGLV6S2xSH+JWmFVFvSXu4RSruN+2ejZulyfswrk7gqOuhRjs5a5Rip3cuES1MPfVgKwmtkQJFTmxOFBp6LvkAdDTbq1uINGbXHFqT/q1z0xNXU4ZZT4qX16k2v2Wb+oKxuoApvmL/Z307D472nhH3i/T01p4JwhQO+xRfd8dWxH1kmzjrrk8Qhw1dk14ImMX9Qqmd/QMXPf+tAZ2+OZ64JVK+WeKihHzFL1rpgvFM0YeiUuMNNwH6hsa5GHdSrPxj677RpM8f+E+cHTE1IZkG1czJtnjt+JNzNvZHYCWyTcrp7dLN6ZbXtOW+M7d7NaLbKNiEZ6G+6tRG9SHuBVmg7s7Lvdwigjur602x59Gc9ZMedzj4l0L7ehIflqP1S3MPTYgcYiSKNEiZyUHKQ1DHipbwaSxycq8wZpUWXvIr8s3Trl0Ul+cng6KeW0+aYx6uaXZ4SMDPAG4e9xEZ6X1lDH//pOfdkbcU1TecqvMj8c7Q176/SumV8StxG+0/NutOndvEWFWCXui5+0Ryrf1k7OdNESriHPrHUITBGJyj221UeMDN9d7fd2YR9TCRLCxyDlEabjLSy46SgJY6lNOUx/NLXs8nLIH9rz7Y8n/OiwAf7fWiqeORcHa1um82/wdfc0Y+KB6JdOsOBnhE4IE8VCJ3EJRp1/QvKSb9v74e9nE++vzNLdIxT7F0fFthZ705bWc/VemYauEXyzHPYPfaJET54qu9tdpfrG2e+M8YmLfepFt1GbErVGb3/4WyerD06sw99BWbwQfIUedwkvFG3ktuD1Yv7vjoQW8/zchq1qYRPVhe5V2LTYXOQcoDY2f1K0W9VBZD8vry1d1KlVXn/Js3Kf1D+wHuZggfn43lfuRAY5e0txp1zVjw8pH8dAbkk+zJmDzGJ6/OBKV1xyO++Qs4udhE7mFohb+K43LdstOgGm0+rGfssJJdNJjaRAH2M9rNO7VqcMJTqGeMHWozH3jNKOIkYYtEXWx0sdf8jRxYIvdaGGTSFs/nRn9T/RIs013W7iaT4hVt15kG7UpcWvU5re/uz5QT2WS+vCUKszmJRnZVm/KsM+n6QnuJI26Fly3WTMD0LUuiP66pKxqYWLWhxhFbY5r1Du/M0v8FkTO4c1rSJMP/fPOlrQ9+MxGyxMpSfd/Mb0QGeephfLizHwWHYDP+0DNqBfXecMml/KyNA9T4umXwmMQWfYUBQ/sCyC+ceMvvQdNZIyijsFSAlgSnBoY8C3hSoN3SjCBxt6tXW3o6lPwGuXMaygrmLtGRRIjDUS8ireC8ItlYaWEvb57X9aDa5QnMdu4mgKezlU/DAkQUOX8BBV1kkRu4daLboIiiHFnxatR0fUhlG3Uh4gAMbIZxVIGBb6LteoUUTFIVpRkvDSIg26cVEWmITJAcJVz5yLqYi3FkKnmle7kubvoYhHawkSnQbCiqAVOUhM1wrGhBGwqcg7NarjmeoIxESOYlmce5x4MyvwPt3Znjz8O8hnHGzqTqVZO3fUjMgB7s7mlRRRYnBtROjn1nCg5G8SQPqufNvNWFngeB7TOmJ8HTeR2ipoSUMxrdhw0H3WSm1Y9mVaKtGaGgJeV7wma6BTZ4zqfe69XiD8zWYw0bIXoiyXH2ke70YgRHh6RuqUb55ETfetFN0GbE69GbXDzpt+/ZfE7v6X6cOp9aYmsD0+owmxSkjHb6k3gY+lWEnUtqFkrygyyaz04rX9eb1DKihYmXn2ILOqs+orX/N2sJb0dkXNgVkOu1pO/RgAA9gW+PkHA23aAfQUAABIS1sI8DrYkcg7Larj2eoIAgD3ANGq0lEum+eZRttoAgL3m0bcw2xI5h7yGMgDgkeB23wnwASJgNQQArEmMFuagOMh5DQEAjxLhkXborTYAYDeghZHAaggAAAAAACSwGgIAAAAAAAmk4RPA6CeYhQQA8ATAXQ8A2BWQho8dc1zoTXRF2el8/cN+O3VxsatHEcsCX2/6cS/S+rC5GNYuUil7C1km2Wy5FshPrbVc3q6Zjamm2RvW7Q2DXTt90ktBHQIAtg+k4R4zGyqFgtIKfswLaDFyPUOLC+1mEm8OTaFJ85HqE2NVWtZGroyeebneDKX3xcwY1/rtQpii2nkuZuNC4aK2kytgQVlst6E3wpkphZSSSime68APFlr885C+lZ9t3AE4NRZJTX4OJDJAVj2ZFjN8rTl5BAAAtgSk4R4z/a7ouvIifCqOYZ/PwJRoaY01SKsVPhW+VtzJlJAz8x/9y7x6v9fDwsybH6PuZK4vL//P2X0upnesNoRR6pwvFrQN+Ez+K8hX5NLey8so8SzOo1Yl2CnZ47pMXmUnC/hvi+7X3drp45A9/tjMKN1eiI0YAADWBNJwj/n7i8kxJSf3lhDr4RQ/uhdn3A3psxN6YN8e72QWULlEUojk2hvu/vBkakfBVsFHkguwBbSqounKzcP3x6fP3tKKh1/H4Qv5AwBAYg5SGs6GSq1A/T5iKxSou8fTQeQOUPB2HnEiAyizVQFa7KsCWR1mLdk/xTY7DH3LjzR0RdGVnBWAbe5ohj9HethKssLvrW9YDnDtlqHMxn352fUcmRn9gsv/rNBus00GMI0WdzGkrd0fLj99jD59Rb2Pph2y0E/qwcYXng6XXAxvItu1seE7xaoAQYmk7MivI7H983pdvq+PLmUkF+5IkubCW9QrMWrCg5BPyNotu3wKC1vyFrQc/Kw19Cc9J5lcdVgBfOm1yoZ3QA/7MjxlVP6cXQpfBs2hrIY8cH8cUK0eAS+ViqY0vsm9h0R908ywOvkzpD4bNXaFEtR2AABgHJ40ZGosV1a6rq45XVd0l3HOH0Bnj2Ol5XoGRwcYKqmcP4BbHf5hX71WpjUl12BfSlgYEYS+DcRjQeRaZHX35b8fhUsmHxnz3o92bkSjVdjnxk/hnUQP9lxvors6EPX5XJ8/f8HjHP7sNbiLITGflOWvHGQXKq04eWmH1CejXCJXNdP8xf+/TgfmZDmR8+6o5zpFRACRSE0x3Ymk7MQdhCGNhQFkjpzLkTgXnqLee7LqK75Y/LxnuKScafQoQ541pZhypozKPXYpLoW45LBiuCzLakiwylK+fJy65X2F3bGeu/6BSL9/lWFi/nvgPWcYXXaF5jArAgAScWjScEhqjNEcKIsF36ZMN5BQs/sBb3okJQZTJ0DT674VEWCmfCpTAN8put/l95KuUu5Sz9SUhxEx/OVPmg4/Mm3S56Z9FrbdOokUWkR7FTL6RAyJYOIjX5lyny0mRLTiKfmtWwz70kakFStT7t0lv7UVz1G+WTllxwfC6eufGfwcnEy6ilKNEzKQlaM3rETSDPXkf3Z+2hQ5sAbERAYQMA3StcLIRM7vpvx/FGqHF478VaYoyoo2t69erFyEF/VK1A53IlzwJFQH0qeQttstOZlaDn5W4dnuiOREwMVr+vgLLwD9t2OQ5WZrloml15NMcXDqxGabtGbja3GtRLVanFZ4pZ+UE71KrGTYd0yqnq0tRVxkgLhkzxSW+t6N3H1AhGz/ZQaJP1WtsmuQyX8J7FsAAIBgDkwatr7SX6a3zrzjKaof5AcGGe105a/cY02vctZRzlzP4NUBht/IEDi4tU4xU2Y3dER7yXcZM0VYmLSmctuRau+F+Os6y/QP/XUf8cC1SIiNyrbn5QcnqiKHRxSvjtPCH446PbmfIn2mxSKlvvR5y5WOT87cT5QlLzoZnkfSWRlyBatGbziJ/GjFL5yrGP/+skdhZABXIquVughTUj0B4mH+FSUakrV4uQgt6seALLb57xtZbLILvfrWq08z+UH9uETF4LsU5s1vXvuKH2W1SqufhUJO9CqxP3yoKnrD4+PxMKTTr1mDdHcndz2onTp7hznh1wMAAGJyUNJwpvSYnqp6dJ7QbS9d1pvP3FzXyJE7YGtIHoE+VgWYKV+5S1rZdhDMSTvll/f0l5jSGRVNuToT+0SpQ3ZBt16NGIOyEikBi29YhOIzf4ALfUPuiTPjN6XB46oY5i0XdtxSS1x08k/yyAp/u2VWiCQrkfkvIStaRgZwEpmvdKxOT0s3J+rMld3KVTV4IE6MXAQUdVhs+4mqciOf1adsGLyi5z/48+CyhB4diW7oPyRbZBG6fDUvciN+KK4BN5rSiWNS9Wx1ec9HBkhA6TP1Bnx/lP3hAACwgoOShlyTuQ2EjG9ct7mNc9kz6gIeNGkQYqOs5Ap+w8CqAEL2udGUapN6jUvWKWbc3lj94uodDkL4IyZ+XhFSD3GbopSDvKNTPJxJEkkp47ZyyUf90riWUC86Sy3ZViPpehZqywxilZq0EunpdR0aXFV5chEaIFDSBf4qAqtwQuYsjJOLgKLe2QyIu0Ea+USfsihm8fZxqGSVL9W9mMUGAAC2yuENQ3EzrCn0kF42zmWV0plyu1CmA+o7/uqbwJaxMkDV9jLkDoKdM4/CEz3FH1Y/UoeUMKcPehlukAl2MJJ6iNtzhFwTukSIvGBJZNR6bkXlIsyLTkpG13EZctmOFM4qNWkZ/DxYJkySJJEBghJpd++GuWkGEWFoTKaJw4s6Dr+SdINvGTkYhfqURTGHjI+3sA2mvPiPXvLeY60onELd28m29OX9+RoKSuw9U1du3EbPHJkSdX6POyy/MW4R4XacxFQPAAArOTxp+Es4Cc6UVo0GgngYKoWaMnM/IxyPQk5kAP5g6H5fZUhI0FP8Jzwe4WDkGhTg4JaAQq7xjk75oHZ3eoqePNOoteXMLMt4VJFpDvt9OX+JFIKOvrH87ZJY4yRcMzBY/GN7Zdj0i+f8v+3d5qRT9CBHBrC1iUzkzBhbQ7ZX9EGvYLV7YmAuLJaLermgZq1+gcmUQsiY3Ry9Deg9Y7iicm2GVaITI3hOmbRaoUzOG5c8E4GulRassD+J/mIZTAylVfTRdc09zPlxU1KamtLgHsySrMJuTPZi58xIMFMKZfpfsV1Ktoqo5CGvJTQ0PmgOIQAAWEFqsVhcXV29e/eOdlKp+H99u6v/Pnv2jH14eGopbia00JrK64bSrSqLDt8fKineiPsY2F6AkQH4rIQ0H6EXGvgiFBl7TuQU3T5jGCKY3CGqA6Xjta0M+xflSaZ5WvdPeW30U70JjTI9UWfjdm5EY5Nvj9M8vFKtnJPXnQjjQsvnlcmE1tzzLZLhDynPKGKjEbtWeHmEn5cfiIFpazUXdgyB31oJIKICyCT5CSq01SwXFy9SubM6F8u/zSj63BsDx2wVLkXVqQ7OfRebY9RSXgmvFadykPLSVwInAIcmj2k8X3WBVmeU4Qogq5JFjMLmwpjLRTfLJcHhZ/Kd4+HhN6bSVG4tR2Gayoo7pdCoMn7QPuJGq9KYMxtfQyRw3+ORASz4NZ3nB4GmV6dmhgQAAIAADsxq2BmQVU/A2lnRlDv9tiXuQWiH4A36dOoaHRIZQFHObmkmGlcQL7xraVVPsSCrXLGkhsZClN4UNWeSQgfpBcY7mISjG7couJ0OFYUWYM3L6DM0Sc2typXo8kAK9c2Ar5JHUEix+IrlXed0y4aNVllJ+viqYiWDkclUi5WpLVzSx7enRZp9Q5LR8pXpuUvVRQRY7nFeiiEm7uJaZnUu/EVdeR3S+5x+L2LR8iHeBmpnWqkyYblDRGJXnEIORmFZKX6O0GzLha126qesNoUW5GNEzGLjhh2Zum9ejTc1q18F14Y7M4S6fFpzDgEAQBIOzGr4xOCGmuQ2sEPBqPElTPbL8iTNbg9y1aKthtHIQl029S3bkTdjP62G+8VKkyFhDsfX5dF8e1cFAHAIHPYwlMdO6aRSVeaN6y2tl/bEWB6D8iAY5HcoL5BpjUFZ6aa3t5hGS7hKOhMWgYdDzCFerQTqQuFleEm6kL2HfIQuBADEB1bDx46wQuWpB3M/Wn9hyZA7QdyXwUza5wJtKveWyMATPZSh15uYJJYkWZaC4ORvx2oovGPlzr5ZfPeJmdHP9SYhfpoMca0zWv7t1Rs1+wCVDQDweDkkqyHTqWKzeYxH/KgnC+6itjdWATmVYDhrTdqSHDnBYfCI6XtLZPr922I14zjvafni4GF04VbQMvnHnPwnBLvftXwlRBcy0mf188V5/Za9MeJqAQCSAashAAAAAACQwNcQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANAQAAAACABNIQAAAAAABIIA0BAAAAAIAE0hAAAAAAAEggDQEAAAAAgATSEAAAAAAASCANfRi1i4uUvfUNeXiLmOPCxUVhbMpdAAAAAIC9AdLwyTIbFwoXtaHce7LMjHGt3d6JiAcAAAAOD0hDH2rn/HxBW6UqjzxWpne6Lj8+YcybH6PufC73AAAAALAZkIaPE6NW6A9ncgcAAAAAYDukFovF1dXVu3fvaCeViv/Xt7v677Nnz9iHfcE0Wj9/NCbC1JSpFj92jtP8sxujdtHr5iuLE1UecDCH/euvk7mwyWmZ/JePJyVfBCtOYY4LlyOleHprHRn2L8oTRclXpidqVhyKYjYu5Ea6kmlO62f+nxi1VK8rP3vRitPb46xitgqXDX3pt8N+qjzRmqe3Z2kRv8I+vzdqn0Zdymmm2vzYYV+5mA3H376KbxVNy3+5OinFTP/mzMbt3CjYWKjxsrUCZJqndVeyzVb7ssEO8ysrSp6Fv0r//NSb8Iws1wdzOP75dSS+VbR88cubY//lplJvs1LPD+onJXkEAAAAeIwcntWQlFnPEm2MeXd03UowJoS0RdnShQx9Pilftj0xJDkFUzBCFzKlEl9XZY9vF5WqNm/kLgpJEs9Jv69kWKJ6N54fDr9TMr64xV/vOpWTyo8y0bj0nGvYz5XtbxVdn5Rz7db+GDKz6iuN/s97hivRptGjy5JpvnEUvz66zEldyGAX69I1SIhfbksXMvTJqHzZX/LgNIwui3c++YrhRQAAAB43hyYNzdb1iD3mtXxlKn0KTwfF5/LLGMzG12RzyhQHp9bP86SzGj/tYRAJTiEsWyxkkG0yCrVzezqoKjpTbDXDJcnUzuJ8wbZBnu1UB/yz2MhkSGTP3laZyOm5f2V877LQqtvkpetzlovBlH47HRSZ0HL9xKhxRSu+5QHyGiuGb7FHgwz7qdRF0BZPX2aP66Jsm6z4GawMZWmfS3Ns+vgLlYCi/3byOfxJl0bJvHrvM/vJCypj00c/hfiTl5tJycopRX4qPFAnZf+oF1Wtsl9m8l/UJXsiAAAA8Jg4MGkojEb5yq1jokuXjk+8/aQrMG9+0+8HdbtLMV06+Uh6YmJIS1LsU9i6kIWUhyxm44JPMBXGQXopXeqcT5sZvdvLBQcIQ/1A2vD3jaOZjC7TP5+9CaEOaNlHnC0df3H/hMIz3en0IGdLJxSgaxXDPlBSuTac/7bsowZZRlm630qNLMnYFzR99pb/RPn3l34iLjcrh49nQvKl1c9FLh7/mb7iVjv180V9ybEAAAAAeGQcmDS8u9PJNpbcRCe5+0Oyz2NbY3rhBdkEhZiIfYrf1+QJF6QLE5I9qzN1qOijROqw9LmoOX3KZuvrRNFevfcIJkV5nXYfyL0U9jli9vcf+9ste/RrmTwc//2NmYjSibRl+rdl78m1UVVu5LP6lA3Ss+z6ffAX+VFOfmAfj0Q39J879pdfbjIiXtpTXUoHx/ndlP4BAAAAT43DkoYzkxTNTol7ildvua3xRy2oB5ZcCb2CyeoLXmbWaucac2uISWyyakWzOohnRk9Xql+S/PyRII18ok95aJDNUCu+wUARAAAAIIzDkobZNNn3fpmyf3FN7L5jiclNaM9f8L7E2Kc4OqtXqpl5t+cdwpIIc1gjXahVK2G68Je0ZS7DB6PwDuLZzW9dyX+IEEzmDXWUP3/BT5MlQ2mmaTkaurbYNr8NfQ1jIgejUJ+y6E3OVFZ6A84MVhaMzMsj9vdIGEq1Inc09GwYiAwAAOBpcmAdyryHUachqPbQBHM47scWZ+oHckWjUQjOz/t8pILdy5zgFGqHqUNl3vANcI4JzUFT7s5puplO0ODmHHWN6j0jbPpDPhhl3vg2ZppPawab0pwc1K4bvKNcBqPI541P/eFsbV27HURvPtfrgSlJqzQcmwqZz+izPADFxcwYfxL9xTJY+v0rbnQcXdfcw5yDMFvti9RFu4YRygAAAB43hzevodFP9fhgBAfX1HcB3xJiqjz+kc93yD850DgGlxlp9Sl88xryXV3JD5IYolbNa2izNMHhUqfzsCYcBJfikfH7yA8WThplR7aPamXR2dB5MilLpe26WBxXgGrl3J08OaOkH/dUiHy+wqVs+k9hXUVGsgsJAAAA7BkHZjVkqCfTSrGa4T2FBE1xHHuEMkPtnFaaNGGNIEOT1PjmOU50ivTxbSVPlsj28mx54aRf07Qyq3tv1c60UtXsVARQ4kbQgAEofjJatTiYenJJw18GeY0P2nhQWGkX86uyKQejsFwUfUOwl+BX89w9RbbaqdP8RFHZtGbKAQAAAB45B7kaCrDgK6BUB+cdn51LWA0fwAS4E6Shd8nUZ1kNM8VpfdMxOOZwfF0ezbcSFwAAAPBwHJ7VEEhmw36BLxP3+Sn3f5pGi1awI/135dWF20J4GV6SLlQyzY/QhQAAAB41kIaHh1HjY4Fz5Ql5K149VS1j9GkmwsueXM5kx5qNd0V7VmsGAAAAHiOQhgeLFu2t+CTQMvnBLjVb+qx+vjiv0+o30IUAAAAePfA1BAAAAAAAElgNAQAAAACABNIQgPgY/UI/aGlDAAAAm4DWdY+ANPRh1C4uaPiC2HZRUc1x4eKi8MhXzZiNC6mLVOAC0BbDmnv5uySTNobCB9CsPOlOYVeuN9FZ5uU+AOBBEY1ModBvDc2Nbktz2G+zdtlq+mM3V2Kwm7U9XNv0FGAXUJ/0dvLQBYmBNAQgFkbtcqRnitOT5VUJZ8a41m4ffJs2U1o1JZWSW6Hm1dBD5yv3Jp/BM6Xg3uUMRWw1sUOfCy3+2Yb/yn8witlQqRXk2dlWa3nSWbPPGMZs1c8FK07R4sfd2RRHanHEiCilQsAZ3eUjy21ps8/gD1DwnH3W8n7r3sSp418L67IGXqPooo6Jrk8a5ctcYd33T7PVvixP5kvLPx0UrBAeuAnL0uoFGWXSg8LeAyANfaid8/MFbRW5hAZYk1LnfLGgbfAUSnLY73XDpsAxb36MuvOl1fQOCyYCckrDtTCj3lVygSImkKkiHszfXU/3755lHrcDU0W5stJ1qYBuQ/kWX1LwbPp+nvPqm0SnYDqsoStaU/HPOh9IVqnQwujKzVKxDr/T38p7vpMUXemWEyvsOMxu6LJWq4rei10TEiEamem00qxmFH1SLozXOI1p9GhO0uLgVDT9bIu91qV6In9CS1o9au7+7EETlj3+2Mwo3d5WOpnAJkAaPk6MGntF3kljCwIwx19pcvBEKyoeFq1PJAK0qjJdKAu2TRV6IdCVT17BUR3wb12b+xnMNESXSxxiqHQ1pbrdhRiHCl8znJIh07lQBk3lJf8yDjKbTW82uy6rW6JTzJRPDRZUuT2TByJ5X6G/vRu+44JktKaIBS9LHeu8/KVsYCXDJ3fs4yx5DFu9Zc/kcfrKG8PilqnTBNz0KHedD8Fydmtks+pZp05p1X+vcZq7O9Kvb49LuLsfnvTZW1o39usj97h6/BykNDSNVr9t+Ye0a4kroccvpdDuD5cjSHKKYZ8H6xvxG7WZ+Yu9IufarfCfzIbjWkG6+hV8OpJ7ChZapitMu9bypdEctvoFK4ZUoV1byqb28ohFFR5DNKsSyeEB2jINKb6syQMw/DnSlUxF9T06ZmNxiS/5rNqsPetZV1z6kloB2t6SEeunSE9WcfVZ+JnRtyrVcoUxh2P724tCfxxQ5R6SIZm+mDS56ljSIat0puxAMnPRB6YhuiwyYvhd0SoJRFscWl/pLxNtnZIjcUpnyllMG5HIJldyvmzaijbRKYTQHHTkbhyy74NKlcloVvwV54yJYMlrcmPkVB7YEjOlpytVdk1zlOZlObtlci8zijL/s+1MCGcR684sJGmmJf6HwVIM7gDtds1Y7+Ye9qlVT9wZKx8/fC1RdxPmabbIpZLvmqw05LeuRkq0aB5TH4/W2/DFzKb6pplR9NHPEMOhQQlgD125C3bE4UlDc1y47DUmtu183h1dJ9E0fr8UfT4pX/pugQSnYOqBlvHNVxYBPmyhZI9vF5WqNm/kSOHJg26G/Vx5ZPdp6UE6Uu9du8LMu41Lr8PRdbkx0V3Z7JY9AYjedSHniSE4MWFEJXImAzx0P4fxnRZafvU+sVEhq75iz0RWND13Myj6r5RM842zQLU+uszxIS4cVmEuXQOVeJUb2d8q+mRUvtyntnH2l/5Wv3ilSXjv5zIiBqVERjjRp/y9S92jL14ryq8E4nIVXKkwkbL2wpCi07b5me/YiGwKRZvkFMMaCc3m1G/Mi8AqVbcC2qg3eWeI3uSXOZnmXfUpS2bGN/mGFhPrve0i1WO3t9Lt8c98c+49c/yp53YWmeuTXi6ZQ55R8z8Met88EXgDzOfdnvvmj83wO7UQevfHCnvBZvxhAvGSlYbYo0YqiQ6Nn830+1dM5E++B0ZuGJSAOcyKu+bQpKHZuh5R452vTKVXyemg+Fx+GYPZ+JoaIMcv5XSQp3fVxk+7Hic4BWudcqM5C8l0oTwUH7VzezqoKjoTZDXfe6hR43JzMJXeftNBXmNp9LZITO2xRIowLAA70PXcjM+rzcqU/zwkABNzc92JoUhPrF78d+rIRBrfKECmOTgVARbThP6fw75lbvRtq6yty5jmL3Y5Xy0r9+xxXVxf9pZLsOsor/j5rVivOX38hbsg6b+dcuEmyCCpKSuVjM1+bZZVjhVE5ZQiPxWlMCnHfkJFlsOmBTX9Q39JBHghYeelW3aNaQgahfChqvxiMpH3Jovu0a3B3RnXNq3ZvFj6vZPN+Kfg/c7VgbLGakSiT9nvlLlBcQmRylT5upo5GOpNtlJFad5Nn7LZEt0OOW712v6K8K/zLh9Ece9NjASvZUzKsKIt8luXNvYwyLtt4dyJWamKe1ucYpXNLJzSB9Z+Klr1bcJ6UDoRCeNZczVhi3PfElJMC07sJ9+U+1Z2jfhtUIJsilfqX2aQ+FNV9kMlk//i78MB2+XApKEw2OQrtKqZPJQuHZ/EdiEzb37T7wd12y8lXTohx1mnuYh9ClsXspDykIWYGsa9BbtXp0ud82kzo3d7OXeAIW+NBiclKwHZ0skXduN3fU1afnArw2RLKjUMv5wJILJnJ50zRw3JAD604tSJ4ZhOEd/XJyqRs9YPHqB+ZrsA2am5X7gr0uv0ei1RSeXacP77RrZz3ATJMvbWO6AlY1cq4WzD+PeXfiKqHHd0FI1hWv1c5OLx32bTdWyRv0w7b4nSBzIvtXhv8gNd71BWZ/NvkqtRLpNsWk/GiD5lj1Mmiyx5cZUtgU7OkVqyfu1ouAHVTpVI8y76lNO2MNeqrDmKv1K69WInR5BUK0IP0SZf7Bjp486JywcxrX4Q92ZCur8NywWEPwycBp83B/lKxxY6abXDne2CbWarKJ3cLs5vOwk6n5LChKP15MsyicaPxSNhNtNpdlH1uzu560Ht1M8X9RPnooCdcGDSUDgcq8lNdJK7PyT7VG+Lnn5BNkHxII99it/XTBcKBSmPrEn2rM7UIXsBs9Xh7O8/9rdb9ohL7hv/z/P4qvry4cMc1touhRrk5/c67W6GuK9PXOIlMrNsiUpA6USaG/3bfa4cLZtQq0+ZGxFYHfrgv+xHTk6PjthjlP3kDzWNvMqREfHS7u+imkPf38V0q4osh00Latk6GEbVNwxlWY6UlKpOI52d7tGt+8Cty+psLlsTVzAYUL58Y3Ti4u7CZspw897kqjK93bLJUPQmO6nKKvSw31WfMntHJVUUXxfGh1yApXcdbdSRkQj1hPqV5qPyJXnItXyOhrxHwuvhJzu4g21mD4r3qcbn8oj59HpU2QScw5KGM5P0yE6Je4pXb7mt8Uegtwa5Enof0uFvw7NWO9eYcwPeFltGs1W4LHcfcqavqZBEjx9p5BN9ykOD2kOt+GbL3V77wPIAAGFmi6OZqEtaU4Q6/sC09NZ7kxl8MMTm6mTZOuhYE+OfokSDf/VGvOkMl3D3KdPZ1youMe6Yhid3/fPvbA71JitKI+c4D9Ar0U7HKe8A6tnpTTZ0di6d1Ben1I+szSeNUS930ca8fWDvOSxpmE2TfW/TFxW/q4nJDWDPXwhDe9xTHJ3VK9XMvNvzDV9NAhn2mC7UqhW3LsySFTPTtHz4XFtsa9nwJx9xWrQdAReLSD8/84Z60p/HNJ5EJjJgvCHvg07AlnwNuRFvg0ojB6NQn7LoTV4e6+xhZvzmkjzz8oj9PRK2WM3xVrK3uJOv7dzXMMedp5wuToE1bDmp4ZfmXlmeJEWoLu7U6GDNhhgLbrjaRJ2IbPp7Ra1hy3QxkpyCZbOpkfNlosoocPqUvf22ayCHJ3eTJCPyWojhOEFsv0+Zpjbc5luxC+Mb2ectJ1++cZ/r5KSpH/mWxXBa1JR594fl/sN7ToPubVen9n2yNScV47vbRJI0m8K9+4jaP/BAHFiHMu/d02n4p23Xp2lBYosz4WpCIwCcn/f5KAG7lznBKdQOU4fKvOEb4BwTadjTmqd+/5Ic0zLzxqf+cLa2nOG8TudEvDOjVSPPv2WcLLau+RNydSe1i6hEcu2odL+KRpTF304l7szZDsLxxTWQxI/wKODvDIF5SasVknfsQvNe+ZVjnWfG+JPoL5bBxHA9VqOu153UYvdkz2hkMZMXBWvZj9lQKZTpg3/Y8toI1eWeQXAmTxG/L/Uzn8CvkfPY6oYtpRXPdCey6Tb12dlsWsOWE53i7Io0VuOTfRvFxupTbvn6bdfi7Av9TZCMqGshZ7pemsOSSm/bfcp8GMra66DE4fmLI3G/Ujv+NWEbNBv3abYa+84VbYHjC0JvfuLe3rhY1py8xoK/g7L313VaGdECTr6LUcOmUWv3rIHMgmTZFC/HIe7dYqKcNeacA4lILRaLq6urd+/e0U4qFf+vb3f132fPnrEPe4HRF04OLjLNU2swVsC3BHvhsV5vjJqYAcoNjSFwmXBWn4KmthkpdoR8V1fyg/gz8FODU8jRVHvNabAhUPYy+6hWFh3uGyJ+bu8SRi3V69q90jL+JXwx8GMu8oOFnQkeofzswtXxHZFIrn1Jbtpo+aoy6b52J/t+GPYvyhPXJVxi6Yq7KgzHFaBaOXenn8ctP7twn225pSX8p3hYZi0l15CfHaoub8KhkuLqwceAT8XcKijs19MlY6GItjmlkbyBp9Cqym2S8RN0oqV6K6YhFNRE16cXO0BwGpqeOatXn0J8K3JNiGJxF1Q8nJRo/nIb1uS02z7sk4oAThqsI+5yECyHFKy+FmG/EnkXV5OxuqjjYTVE1cF5kp954Den77bk0KxRyy0UtXNWYx1594rBhvygC/ecFPIB4CPZ84AY1oSvduhDIYqlvPifi0FFZLHcAjItOPc/9uJlUxR7SAk48SQvIpCAA7MaMtSTaaVYzfBeOiJTTbbIhdo5rTRpwhpBhiapcetCRqJTpI9vaYTcpJxoFs/0a5o1JrQJoLEpg7ymyd3EZI9vp0V7JQqNzlWhbiebrPqlyeJ3FUO1OHV0YSyiEpk+u2UnFadg8Vemt2+2OwNybEpvqBvINUGRH1r8M++UxjL2eL5M8XOEruU1yjNxhNqp0xxJa1/N+yB7pkwHrKbIXUa1mVjurMZ/Co1kRCJdyDi7Je86TyTNBCOFRRqcNVo0pcnS4F3LJNkpuNMhk0hJ16kTfcqMrQzlLn2m2Lpf45r0Vl8LmkwnaCoc4SK51UmpsyqZT7X8h0RNT0zSZ/VTp63PZKqV04GYHSA22eOPnluXR+IZvcEeADSTS7JoA1h38hqb0skGrYxoAcXnTL5ZOb2V8yxYxM8mn+Mj1B3bmg8M7JjDsxoCsAaRhsMIpLF52dQn39UzxWl9Nw5T90yYxQgAAKJYaTIkzOH4ujyaP50Wc085PKshAGtQOuFuodeB80tGYBqttvAyLF7tTxfwjhBjNco1aX8atjxedwAAEIaY379aCdSFwsvwknShkml+hC7cKZCGAMRC7VTyynyUS7KIqtGnCbwue9xh6TBaMzFWQ+kqOTGdcoOvbrJrhnSuVdu2J2fZCU8jFwCsxczo0yIQxdOVvuTc4Wbt3hsQF0hDAGKiniwq5E+TXN9pmfzgcFqzzpTPh8KpeodoAABAIKxdpcXBQjtW0mf188V5ndYZgy7cOfA1BAAAAAAAElgNAQAAAACABNIQAAAAAABI0KHswzujtXtq0m3hm/J6J1jTnwrcM1EDAAAAAIQDqyFYn9m4ULh4uLlJhjX21rGMlaBZq+DZ5/CDBb5erPV9ECKEw2zYqhXs4MFZtuNLUiLyR56fyHxZxzbMJgAAAJAESEMfakcu/F2Ry1c8SmjJ+QVttNLC7pje6UtLH+0f3a+bSSSSWblyo7s6r7PWp+Xl0aKZ/uE/6n53hN2QFpNIzqbZBAAAAAhIw8eJUSv0h4euBEqdhYAL4OpA7nnWUtWqVU3v3QQVVfbsVv7CH8NicWsvQTis5Zjk06rNwXQqv/SegSOEYbXpWU0wLtVq1aUNmTKkRMs9xobZBAAAAJJwkNLQNFr9Ns1FTFu7Njbl8biYw367IH9+UWj3h8sRJDnFsM+DJZlKeWb+0iflXHsDO5E5bPULhYtUim+Fdm0pF7PhuOYE6LecAEZNHOSrsXfLVhgKts5qITvl5YeKpje+uXtbEzBrfe2SHLvtnJWyofMZSmE46LyXBxLy4YOjDUkZVj4kXiw6VjaNWvsilWitbgAAAAfH4UlDGgXSa0xoeQrOvDu6biUQh7TGY3kyt/sO9fmkfNn2xJDkFLNxmwQWH+8Sfyrl7PHtolLV5o3cRSFJ4m1mretyY+J0kerzbvnS6/DWz5VHXSfApFH++Sg1Re59RVu3t3V209MVrfl55SAeLgy15nTZlhjN7O8v+leytSFXhu9LL14ryq+/SZIcI5uG0WV1cj75mvhlCAAAwOFwaNLQbF2PmNyhtXakT+HpoPhcfhkDscajkikOTq2f5zPscdv4acgQSU7BdCGtDLTeOGi1c3s6qCp647JQS2BwtHhebVam3B+RbdNBnh3qfrczwSQKCdbmVAZYTCvN6pH8jp1aHOS/qg6sMGy7jb0U3LDv2Bo92yam0ECyZ19YMa3V28o9AV8rU9cQlEKt5enJl8Lwyu6BXgvShiQFhTJcK6robKpqldXVTP6LisUEAAAAhHFg0tA0ekzY5Su01o48lC4dn8Rewcy8+U2/H9SPS/In6dLJxyZ74E4MaVKLfQpbF7KQ8pDFbFzwCabgjtp0qXM+bWb0bi+XsCc3e3bSOXPMlNmSGjReZdK7sURnVj3rHK9hFtsLSHit06ksbHrdRtk1BEVnuznbvrodYchgSWSyrrW+MmREZlPt1M8X9ROr7gIAAADLHJg0vLtjj/iquvZUhXd/SPapXomUfkE2wX9/RS9dzFP8vma6UChIeWRNsmd1pg4VfZRQHZrDWtslQF2TOXJKnUpVY0Kjl0tdFGpjl6PhliidOLZGz1bfWGYtU/rc1DyjgBOhVe0hKNMBH2gio9qaMGSQNmw03MpQ/zOVn+KyWTYBAAAAxmFJw5n5T37aGXFP8eottzX+qDl9uA7kSugVTOEdtbNWO9eYK1pxGr8zVzFbhcty13GYDELt3J5PqR85o3dHjfJlqvCIxy/w3tb1HA6Z9OvYQ1CypbMrEofcD5B7IjL5nJN9zakUDWamgTn0OdasgtRjrb3M0Uey+Skb2AyJDbIJAAAAcA5LGmbTZN/7ZW5mAbP7jiXmX1KDz1/wbrrYpzg6q1eqmXm35x3Ckgiy/DFdqFUrSXShogx/koTRigPblXARPI1jlvqR6ywAN0xOvgYl9Zc0lybk/nwNBby3tXeTyBCXpdEg9zYnDE1S40yasybrZBMAAABwOLAOZZVc6vTRZWFsD9wwh+N+bHGmfqCBF5OyM9GMOezzgSl2L3OCU6gdpg6VecM3wDkm0vKnNU9vOwkGNzu8TufEz2ZGq/bD26Fstmo0W42tibLvX2nUxXkn9wW5IzrYMx7FDIvU26o3vvbkbiy4JU9vfLLV6mxYo3lqhHHPPTGiYMq7m8XUgxurvPVYlU2z1Y6eSwkAAMBhc3hrKBv9VI+m43ORaZ7W5TCRgG8JzVny2LvIsiCTH9RdqxSvPoVvDWW+qyv5wXmCdY5n40KO/SjTnAZ65hm1Jd9Bwu50lj9folpZdITrI+lO3jnqoTo4987QsnSiZP3aGzKspVwrRdswZcZTOWsVcg2lObU1Gj9AmdJcBwU8KuuHbuzfuNBonsPAiyVCB8UTzFISLdxfbC2bsqoxktU2AAAAh8SBWQ0Z6sm0UqxmMnJXyVSLH2OPUGaondNKkyasEWRokhq3LmQkOkX6+LaSJ0tkoqmI06+1/CBYF8Yge3w7LdoLbmgUVYXbu2zSZ1eVqmbnQITx6UKG2pl6gu033BMvIdmz2+nAWZtEoyEpIbpwXwjNZvr4Cxm9AQAAgBUcntUQgEPFHI6vy6O5kilO6/dm2wUAAPC4ODyrIQCHh/AyvCRdqGSaH6ELAQAAhAFpCMCOGNZSq/GsTHgPcO8H2+kVAAAACADSEICnT/qsfr44r9MSPdCFAAAAVgFpCMCOoIkKV7Lfw1kAAAAcJJCGAAAAAABAAmkItoLRL/SD1vwDcZmNaUnrPV+N8KETiWoGAAA7B9IQbI45LvQmOhMOct9i1uqTkuDL39WGiZfgMGoXFyl724UkYAm/uCjsxeIgs5vfNBu1Pvn+ELJrWLMXKmRbqPJ72ETyCqZPejupCgAAACQHKA1nw36hYD0FC37JIp+RtZCHj7CaLG+FsUsWmUMmidynaNlr5hk1+yfLW9hJfUSlwX7MF1zr74mD8khEDAkTadQuR3qmOD3xLtc3a7VzDRKMnHm3fHnfA3L3B1bghYvV2RdLESpa/sMeOyBumsgY5bCSrHoyLWaUSS/mrQIAACA5hyYNh7V2rjzRLcGi6CRZCtt80PCljZkkcp+i0fv2EKpI79mSdHcM+71u0FR55k2Pz6E3PV8szqdNWjHl199k5jm1c36+oK2SeBGTPWN659SHMLLHt4vzxe3DLGBX6tBlYttgdVFvmMg45RBB9vgjq0zd3n53vAMAwCPmsKThsF/uMr2iaM1T/iA8FQ9CvduLa8kQj0a2DcSSY1L6LKyFg2eta7HiblWegp+lmX/JvyW1Iw9KteTEwDa5fnEUUWlw0EfBkjQihgSJNMdfJ4oWtA7g3R9WDtW3Yik/aW16mhi1Qn+4ew0OJOmzt7Sy5Ne98AMAAICnxyFJQ7PFZAyjWrmVSiZd6kiDVPf7dgyH0z8kPRUl/8ERS+nS2cnZA/USdr+6e7q3zvDnSFcyFTVgrryjl0wMdg0uTc3hNx7u/XI402j125ZDYbuW+HFvDvvtguWPWGj3Azwak5xi2OfB+gnMrTPzlz4p59qtgJ9YXfNlqnjdsqtf3uWBsNLPz2wVeCf+UHht0lmkB6d3LMhsOK5ZPgyFJalKp+BndLw/C/2gBIeyMpESdxoofudaxCoHRngMHtQ37JVFH/0MTAWdrX2RSrQkOQAAAIcDkoYzo8ftedrLI74vUD8IbfjLTPKgDCX3UpjZJuXC+GEtSVo1T4Y6/ffN7pJhfGeP+syrAMVHtp0v3LZTYFrkstzNVAd1YUF0YY4Ll73GRKhpxrw7unb5R0ZittqX5cnc7qPU55PyZdsTQ5JTzMZt0i75ysLnNrkSMsFWqtq8kfM4d26TXz8KZeG1Oe99638SHpz65Kt9umE/Vx51rXLQg6Xq3U3twvH+1CeN3FbVkzcNFH85TLuFED+G9PtX7D6bBL/PGQZ1DcxhVgQAgPU4wGEor194lIwUc/rdlO9uSPbsrXTW0kfl3IUY5vIwEvHlmy+UlHnj265c9k3zF5Ogr8JkVEmtaiRT9GpxuqgvT+9stq5HTAfQ4m3Sp/B0UHwuv4zBbHzdYBogUxycWj/Ps2s5b/y0M5zgFEwX5kZzFpLpQnkoPmrnlpwT9Ab5rbout9U1zzvuqwOrU55trt7/aD8/fa5rrAzJwq13WXlWFtMi0/36nzv+tVHjinZgdfpPB+ytYOm6M6XVVbRmZUphhCtFgoHGkYkc0mtC3nE8mFaaVfsdLFY5rIzBR1YlD4VfZpD4U9UqqwaZ/JcgYzYAAIAoDkgaTu9se8QuUTvTCpNEEj7MJZew825blD5wV8Lujx2d/Y5K9HU6+AFs1FK9rp7RqFvZslwO+6mUPUDVNGicSr5Ci7eJI0q6dHwSe4Ff8+Y3/X5QPy7Jn6RLJzREQZmIbuwEp7B1IQspD1ksj+b29oFapJl4mjYzereXCw6wCZnmlS2hMs3PqpJNv5a7rFSNLumtk5IVIls6obcC2ZvvwDTZ7ZkoibSsG1tm0ruxlHFWPescJ3ejiBtDmgpAvxPa2IfaqZ8v6idWtQAAAJCIA7Qa7pys2rk9X0xPB9WMlIhb77yLSelNk1KwQ8NhGMNar8tk26J+e1UkCxbP/uzvP6ZsXuZEEC4sq2pyE53kjtw686pXO6RfkE3wnxwKHfMUv6+ZLhQKUh5Zk+xZnQbu6KMtq0Pt1XtL9nk+c3ipeh34UhdlphZZMXgS4Z1xpnSyWJxvcaU+ctvVFL3Ry6UuCrVxmJvgCjaPAQAAwBY4IGmYOxJCzTeFihw4oh1JxbItsulSp35rDYJO1Hm3PYTDHxmQvvP9+8L4ToYsLtuyx7fUjTgpF9qfqP/3+QuhbGYmKZqdEvcUr95yW+OPwDmM7NHc9rY8EtyCT+U4V7TiNDzM04XeiKbUC5zRu6NG+TL5oimbxwAAAGBjDkgaWn1wloeWgIsYpgwrCQYeJGFHPXexKalcmk66PJvb5YjEdpC/14ycEB1KJ9yWxoeLCL3IyKbJvhfsLRYfu+9YYnIT2nPhThr7FEdn9Uo1M+/2vENYEmHSlJmNuVathOnCpNM6xiRLhlLX7ELOtjzuZ+dkqRe4zs7Or7hroIyL1eUQJwaG8HM9CvNFBAAAsDaH1KFsDUamWQzF84Y9zntcMgXOq7IOTB/Q2id2R97MkDPm+Lrz7g/1M5nEdoLw9/q9PNGLUOGucraH+FQ/2H22KolWfXRZGNsRmMNxP7Y4U7nmnpSdiWbMYZ8PTLF7mROcQu0wdajMG74BzjHh85x351rz9LYT9I7BLdZ6z9jJoHWKfN741B/O1kj5tjBbNZprxs6fmMnS+xq2uhzixSCZGbRiX4ifq9lqR09TBAAAIITUYrG4urp69+4d7aRS8f/6dlf/ffbsGfvw8PCxEfKzAz3RraEJw5rw0/KRaU65DWY2LuRozKsfqw8x5OeeUwhk56Mdc3zipcF1RifX8mBUDDZRiRz2L8qTTPO07h/ZYf1wGXdURj/VE8LZxhVZwLeEVjy9PbYydrF0OTP5Qd21WMfqU9DUNiPFjpDv6kp+cJ5guQ9ZmKuv41LFc4o6uE5aAUh0NhTxmYeUx/nnakXMQB5c2ta3DF4l8oNFWLZWp4ERGYCnc6lKVQc+d8aleBLHwKFZixrzkOskryIj2YUEAADAObBhKGpncdqkqS0stExz4Bdtm1D6zEefaHKX6RCtWhxMz7d4iuRY5tLtU3rDB5k4s8VY0IAMmkJFoml8ahVyOpRDUjjqybRSrGbs65GpBq2rEo7aOa00acIaQYYmqXHrQkaiU6SPbyvcLzLRfMnp15S71fpe5ePWd2W+laXt1Lr7J3125cmguOJLqm5FOcSMgeAjz7Xim2DZlz4WDrYAAADW4sCshhbDPl+YYYUdBcQk1HAIwE5YaTIkzOH4ujyaK5nitC4skgAAAOJzoJPXyNHKk68t7oQ2M2qBo1NBNKUT7qN3vfW5/AAIQEx0Xq0E6kLhZXhJulDJND9CFwIAwBocqNXQcshzE+zVdL+EuSra7EMilxEOffnKNMkCcwAkZWb0c72Jy9vUhzAoZrT826s3ahZmbAAAWIcDtRoqSqlzOmhaU1IrmWqz8hldy+uiniwq5FgIXQh2CqtgtGRNsC5kpM/q54vzOq1+A10IAABrcrBWQwAAAAAA4OdgrYYAAAAAAMAPpCEAW8ToF/oY0QQ2ZzYupC42Wipw8xg2A/cCAI8VSMNdMZTtcit85O5sOK4VLlIsmNh8o6RjxLAzzJY7YamLWtjj5SETabF5GraUC3Nc6E10dmHlvsWs1af4aWtbK8QkwKhdXKTsbRdPW5bwi4sCVg/ZI2Y3tN6Loq9ce31m1Apt5z71NiCxYtgh7C7QJ72d1FcAwG6BNFyHmdGqtQupVa/jw+98QQbWNt6EPHCH/Vx51OWrNgQSHcMesGkiY5RkJJsXVEQMMRNp1C5HeqboH6bNlyohwciZd8uXoTob3AOzcaEQ/qpzP8RIg1gnUNHCF9ikZXh6XT1wzSEiOobdklVPpsWMMulhYjAAHhuQhmswu/nR6M6th30wpQ9F0S6HrM5syrWVNVorZbHgm7WsmSAqhp2SPrvlSZryNISzYSLjlGQkmxfU6hjiJXLY73WD5tIzb3pipUEqzylfz/rX32QSVu2cny9oq+xqVZtDYnqnb1jhNidOGrLHt+wGvA2dk18YBbVmZSpaj6UGJDKG3ZM9/shqfLf3YH3aAIC1gDTcFSXZLoesn3b3hz8btIpaCpvyJSKG/WAfErl5GjaOwRwzpa8FrcHHL3T1rYhZGnKeJkat0B8+oF/BgTH9w1458l/O9nsq0fTZW1p68iucFQB4TByWNBz2ySOnMJ6Rj4500CnUfOt4mMNWv2B72hVczmHCrTt1kWuITpxJWYShYHYkRs0+yLfkXVexYvD4KRb6LY8Hm4ih3ZqxYJaX25bdAWMm0lWS3M1OJiFWSUYSlYboy70yhgSJHP4c6UqmogbYHI9eMjHYNXjE5vAbDxdgmzSNVr9tORS2a4mfpOaw3y5Y/oiFdj/AozHJKYZ9HqzPFwuKx8z8pU/KOap1gQxrstwcz8ulOumu1YUgobmy2hPhMVjXmlbIVLplKxK2xa9yvEoUWqbrLO1aazkNIQ1IvDRQQdnH1/K1iBPD6qJOerECr4VAfdPMKProZ0g+jFr7IpVozXIAwM45RKuhPsqRj4611x3lHGcYs1W4LDcmTnePTs5hha15y9jDO3pi0RO9cSnbVq7kYkLua24/RX3SCPBgm//51s+VLS83FiZ3rw0we7rQ2e1Ecje7b/f/CFh1ubeE8Z096jOvAvuz02dfuNmkwB6xl+VupjqoL9kmzXHhsteYCAXKmHdH10uCYwW0CEh54vR56/NJ+bLtiSHJKWbjNl9hvLJIsroNdV9Wqtq8kSPxJA/6ubthtcL2vPTVSa/3rb4sNH3uuVTtvYojMoZtoPeuXWeZdxueW4/fm0sNSJKruRJnfBhfNsn1upKkAYlXUAkuVsC1sEm/f5VhKf0eeNcZRpfVyTnMigDsFYfaoZxpDk4Xi/OBcN6SRh3WrF83eGNX5d8uFqcigN79Qe2m8N2xPMbYs3PAd2m7tV3M1I44EuWlF05UDLPxJ27HstyMZCK7Zb/y63YnSpWHkVFtcaxiZDaN71z8atWKLKIpS2fmJf8uXklGEr+ogy93RAyxE2mav1hGX4XJqJJa1ejpq1eL00V9eZ1Ds3VNo2C0fGUqfQpPB8Xn8ssYiFWFlUxxcGr9PM9SPG/8dL3xxD4F04W50ZyFZLpQHoqP2rml2sheeNjbVIBQYQKi66u3dp00alyP2q6300FeY5n45iiKISnwvPDapG1aaVaP5HfE6hisaz1gSp0WnJSRsC1BlePoc1aS4izsFOxA15Y98t6U9U0EYFVLbwjZFCsNpY48KKtrcqJiiC5qYtXFirwWbrIquVH8MoPEn6pWWV3N5L8EWdwBAA/EYUpDstyUqCkqfaA22kKMGGBP0OJn/i174S11hOv/fEvDhK3hHQs5okBrykfIYrFsTApGzkmhFa+km1G69Fkom39/fU9jrTjt8DDZ9Gt+IOkAiM0hVS16mrKsMFmx86P3S8jl3hp3d+yCvE4HP9uMWqrX1TMau0Ld3zfiAvGebsvUZBpU6/IVWt1NHGFX9Phk2WsxBPPmN/1+UD+WlZb9/IS8/5WJJYFjn8LWhSykPGRhda87W3A/LLvKJKb1bi8XFIDpoVu73rovx9BgrxLVwYntepstnXxhN4mj4wWT3o0lOrPqWefYqVBxY9ic/OBWniXLdD/790t6Soh7065vDJaGK34ttvRWZjcgQva5XldiNyDxCyr0YknCr4WXNDU/+t2d3PWgdurni/qJVV4AgH3gIKVh5mVOfvLiDA1xtbHcV4w1bH8CG7YHgLufswSNcvZDOsfnXlHmf6b0z8aVEWmuuI0tODZG/SyNbfNGmXeah3sj7Ziwy30fDGu9Lj2/67dXTL7PRZfc7O8/V6q4sKyqyU10kjs+HEH1PpbTL8gm+E++CcQ8xe9rpguFgpRH1iR7VidTK6uifnXonUildMLqpDCj8jLxut/JPlPnhYfe0zRFb/RYzS/Uxr7qFCeG7VD1FbaDGBrimywmy6/F/b+VhRG7oEIvFu2tvBYAgMfNoXYog51D+oC6mYRA5P1T2/TafBTwXnWhJLLHt9SNOCkX2rzP8fkLIdtnJj2od0rcU7x6y+1bPwKvkdW97mzh/bB8Ksc5Ga2T9tVGoHZuz0Wl0rsjeuV4uKU+Dh5cCwCeLpCGLoIMhDOjJ0yJL8M8ae6b3Esutthz1/eodr3T7wlZ6maqs4RNp0Xq/mJlu/3evYfn6CjElWpGTogOpRNuS+PDRWzLUzbNbUqBjljxsfuOJSa3DD1/wY3EsU9xdFavVDPzbs87hCUR5rBGulCrVhLpQm5ak7M/ejd/P6lTqagwJ1+tpMaPgbFLG56/71hY6V6La+HioeyIiQpqNWHXwodwxj3alxYUABAFpKGL9PsKV13dnjXfhJhthOGZcET0EPFnwAM07nJuPH30KdDTf0+Yjfksd7J82CNEyG4fD1uSMYlMpHCl+r18NYSLp6s62R3+1Q92n61K3mr66LIwtiMwh+N+bHGmciewSdmZaMYc9vnAFLuXOcEp1A5Th8q84RvgHBM+wL8715qnt8LJNT45pq/njU9OnVnCbNXIJ8EuZXEjOC9y0TFwKJii94xdTMEoHPJoQJgV+WzY50Zib+fsLtMQTcyCWkXUtfAwM8gDM8QZ12y1o+dSAgDcL6nFYnF1dfXu3TvaSaXi//Xtrv777Nkz9uHBGfb5jGLsjdl6P5ZH8oOFWDPAqBWciU5s6FHn8dLjYwvkZ47ddzYbF6Tnnw/XSQkZw1LMsWIY1trsAcwPunD678Ijj0lkGtYNkKAkI4lMQ+TljlHUnMhEDvsX5UmmeVr3F7fsWg3AfQqjn+qxZLlxRRbwLaEVT2+PZYjahTd9jEx+UHetg7H6FDS1zUixI+S7Oium8wQracjC9BWdw7B2Ue7aN1oAwWVVrViLfJDuFBMIuKkOHGN5VAyCjaucJ0IemysGnk3+yYFmLPJa9FekYekrwVIiw8szOobIgoq6WNHXwoGmVmrMQyqTrGqMZLUNALBLYDX0ImbfyNgWLk3LNwfLAkvtTItVzfKiu3dKnTrNN2Gncg/JHl8NPEW0nyUZj8hElt7wQSbObDEW5HDJpy8RsEKgGUPI6VAOSeGoJ9NKsZqxT5CpBq2rEo7aOa00acIaQYYmqXHrQkaiU6SPbyvcLzLRVMTp15S7YF0YB1lWobU6fXZV8dUoVphuLRIVg4BdTU8826XUOR00fVd8ecai3aYhkngFtYLoa2HDh8drxTfBsi99TNN+AgD2i8OyGgKwK0INhwAcLitNhoQ5HF+XR3MlU5zW45luAQA7B1ZDALZB6YT76F0HTvYHwCEiZmOvVgJ1ofAyvCRdqGSaH6ELAdgfYDU8NIJ8oTwEOwzdL48ikcsIh758ZZpkgTmwFzzSKrfHzIx+rjdxucT6EAbFjJZ/e/VGzcLWDsAeAashANtCPVlUyM0MuhAAdhfQujrBupCRPqufL87rtEQPdCEA+wWshgAAAAAAQAKrIQAAAAAAkEAaAgDAE8boF/oHtT4lSA4qCfAAabgBw347dXGxqzvKHBcuLlj8j3vV4YfNxbB2kUrZW8gkfWKkpLW193GI8WxMNc3e9rhKDMcFVtSFfusBStFsFdyX+6IWNinjQybyvmE3YG+isyok9wEIgFUPfdJLQR0CCaTh2pjjrxNaUED3r1+7Je7u+CIBmb1ZvDmYmTGu9duFMEW181zMxoVCuAjYCpTFdhvN5sxo1dqFMIXNGX7nS1uwp8zN/i58tmkiY5TDvmDULkd6phg0ZP6R1+qZUkgpqZTiufX5wUKLfx7St/KzjTsAp8YiqcnPgUQG2Ii9yUVWPZkWM8qk97gtEWBrQBquTVqt8AUotKK1VO1WmZm0KL+SeeVavHkPMW9+jLqTuf48HTgsd/e5mN7pXHwGUuqcLxa0DarySBj5yuL8nLbleXd5FudLy4rdJ9njukwerVLyQMxufjS68/DCJkofirTEhpZ3rzl+X6TPbvnlnvI0hLNhIuOUw34w7Pe6YVMG7kGt3grdr0wpPXr2IRfZ44/NjNLtPYZXHrBzIA3XJ312Qg/s22P3Aq1bY3rHm+0QybU33P3hydSOgq2CjyQXYFuUjm+ZOLs9WXu5vPvgUSRyY6hbg724Jlpy8ZGhVRVNV24euTbcm1ykz97S+phfx/tr8Qf3xUFJQ+H31jcsB7h2y1Bm47787LodZka/4PI/K7TbbJMBTKPFXQxpa/eHyzeR0aevqJ/GtEMW+kk92IzvE/oXJrkY3kS2a2PDd4pVAYISSdmRX0di++fJdfz10aWM5MIdSdJceIt6JUZNuJSV6QzdssvJrLAlb0HLwe+yIWwrk56TTN54WgF86bXKhnfVDfsyPGVU/pxdCl8GzaGshjxwfxxQrR6OGffMS13krHIoBxS1dTmszdvFz7+tGbNWm3/bbs3MYY1/Lnjq3Gw4rtn+goV+y1MO4hTstyxYXyQpob/g6kRKKHLHZ7FdG5ryDLHKIYphX4afGXZOCzX/z8PKQRZgQKefVThylzH8OdKVTEX1CcOnVatfKhVNaXyTe4+V/cmF+qaZYY35z5AHgVFjlSDRwurgsXKAVsN/PwqX3NdImfd+tHMj8tFmnxs/RXtLTWCuN9FFw8nR53N9/vwFb2OHP3sN7mJIzCdl+SsH2YXK7iLW+loh9ckox9vUuJjmL/7/dTrwlX85kfPuqOc6RUQAkUhNMd2JpOzEHYQhjYUBZI5y8tMaufAU9d6TVV/xnst5z3A99EyjRxnKNN841mSmnCmjco9dikvxGOawYrgsy2pIsMpSvnyCzW+3Z4mqeSN3We7yz/qkbAkdpnty5VHXVQ6N8uWSepv/+dbPla3SYmFy2yyqYe2CIrfTwK5V+fLb1q+FPsrlenZO9e4o51J70eXwy1Krfp6/kB9Y+0NvZes4cjyyWv2+wmqW8tgHFO1NLtLvX2XY+8L3wIeVYdBNO4dZ8RA4KGkohkQw8ZGvTLnPFhMiWvGU3G8thn35Nq0VK1Pu3SW/tRXPUb5ZOWXHB8Lp619IKz2ZdBWlGidkICtHb1iJzIj4F+en7FWPsAbERAYQsNa6a4WRiZzfTfn/KNQOLxz5q0xRlBVtbl+9WLkIL+qVqB3uRLjgSagOpE8hbbdbWo3VcvCzCs92RyQnAv7ETR9/4QWg/3YMstxYwzKx9FDOFAenTmz2m7lYZpZ9LarV4rTC3SIn5USvEisRlqqAjSxw0WR59+vifGqVwyCgqK3LsdrPr1qZWgG05qm4dlLozMafeDlozcqUojoV7qHdsl9OdLsTisc51+R7XMERmUjjOzeCa9WKzOCUJSPzkn8Xrxzik2kOTtlvpRds17ozV5ZD9sVz2llmxl/CNOfO4W9l2qvl0SdPplZLsmcKi7p3I3cfKfuTC/Fm8MsMEn+qWmWXOZP/4jdFg6fHIUlDy56XH5yoihweUbw6Tgt/OOr05N459JnW/ZStqs9brnR8cua+MZa86GR4HklnZcgVrBq94STyoxW/8BFh/PvL7ujIAK5EVit1EaakegLEw/wrSjQka/FyEVrUjwFZbPPf1lhX2YVefesVC5n8oH5comLwXQrz5jevfcWPslql1c9CISd6lXgUZJqfbamS/+J1gZvd/CbtoRWvzkSYdOmzEHD//vrKQStOOzxMNv2aH/iVpM7GQe/+kH242XSpUz/bwTCz6oBFy2+8D6I6SCLKIXdEn3X+Aic6uEVf9pS/hL127hz+VhZirY/kkdXqD1VFbyhx3w/2lX3JRZruKv3uTu56UDt19vJ/wi85eNockjSUErD4hrX04jNv6oS+IaecmcGbZY+DTpi3XNhxSy1x0ck/ySMr/O2WWSGSrETmv4QsThoZwElkvtKxuocs3ZyoM1d2K1fV4IE4MXIRUNRhse0n7EWa/lm9b4bBzU75D/48uCyhR/zxrsz/UOsri9Dlq3mRG/FDcQ240ZROpHHLv9XvdxzG8xf26Vz2LcHUKoecbdTMSbePP95y0Cq2vpRWwNutDbRQP0tb2rxRvqQ0+P0dt0XmZYhlPKIcLDXMkCJS/72D8QuPoVY7lD4r7Nyxbcd7ytPIBXgqHJA0lHqIv0lLOcg7OkUzRpJIShm3lUs2ikve3KFedJZast+vpZNOojf4VWrSSqTn2To0uKry5CI0QKCkC/xVBFbhhMxZGCcXAUW9sxkQd4M0h4jeN1HM4u0DPEKyZ/XptNKkfjMO9/Mr7NFcb0cvSYH9+zszb1i7omU0pt9uzBm/1bTt3TqPq1ZnlS/Vxz+LzdPIBXgiHJA0FHqIv/kKuSZ0iRB5wZLIqPXcispFmBedlIyu4zLk8ht3OKvUpGXw82CZMKnxjgwQlEi7ezfAOSmUCENjMk0cXtRx2HqXYgKk2z71voliXh4V6sE2mPLiP3rJVYhWFE6h7u1kW0/iDX0N74WcVQ7cwc6zde5XkWSz6lmnzs47nRa57UzRbUfA3RNVDukXZDac/5kaPV3RKm8rmqL3DGGJe+26dbgRL9hjLBb7X6s9lD6wy6TcuC2SOTLC6X/knmTKQu0ve5EL4aWapI8LPEUOyWroSEAh13hHp2zS3J2eos/DNGptOTPLMh5VZJrDfl/O9CCFoKNvLH+7JNY4CW9dGSz+sb3AZVo6ott+QE46RQ9yZAC7FZeJnBlja8j2ij7oFax2TwzMhcVyUS8X1KzFZyrxznLiwL2v2NNxuDOVY5XoxAjuW0yrFcrkvHHJMxHoWmnBCvuT6FmTwcSIQEUfXdfcA0L3EWsMxOT7DvpYs++5FNFHn2quOZbumdm4xqrZTOaOaURuovPzsOUgtOOvr+wezlTeq+9Z3dN/f+Wvuu5OauEx5hpI4mdfajWfD+WivalhtqQ0NaXxVe4RWYVEdNe10MhMKZTpf+U9390mTyMXhHg6hLzP05wSQdMUgafHIVkNbQko5Jp4MRI9m6Jr1RqKMSlfXKRYizhXtHyeGuolvZJNy3aVh7wsT6SlTvbbusLLntMgf7so5t0e99Nh8bsmgSi9EV7prM0W31I62Smbp/J9PDKATJJI/MVFrid0oRMgJlYhWCeyJkbzEpKL5aKmZ0mA2dK8EfNj6CEDUYX3lT4q5yxjWNBke2V6vFkT0cWfhU7gJDY4o7YPPuF31RfMRzlfYVtLVGSP3/LuS1ZOjmPW0ik2Ylu+hiXhgaZ0hR+euyStOf8sxzh7psnYhsns8RdeDnq357jZsS3+xYpMQ4xE/tIn5ZyVu9Rlg4fTmt6u1BXlsDnxykHX2R3z6n1WSMk5n23H5crJUGl4izOQZJn9qNUGnw+FhfuxaRHS/C+6x5z2uUl/u2Vaa462HH2rVRV/re9aAazNP2NSZICnkQtCDCAK6eOSHUHzbujEh+DJcEDSkESbWw7yFyO30yFrTk+mRa4FGRmapOZW5XfpsrBT3wz4KnkEhRRLDljedY6+sXpyE9nn08dXFSsZjEymWqxMT6ybNX18e1q0naHY11q+Mj2vO674EQGWe5yXYoiJu7iWWZ0Lf1FXXtM1CXhbTb8XsWj5D8HCVe1MK1UhLHeFSOyKU0i3fZaV4ucIx4HlwlY79VNWm0ILcn9gRV3cXVGXOvXpIK89YDlkj68GngxqWr45OF0a5vKQ5WDPXyOH49gDU/wje/groj1dawB7UavVEzkB1saI+V/csCPTAbuGclfRlOpAue3IvW3yNHLB4OIv1KvUmtYIHACpxWJxdXX17t072mFvErH/+nZX/3327Bn7APYBo8aXMKlWzu3hyQ+P0U+Rr2GmeZpcoW4KTc7beF5Z2LJ1DWSh8ql4POkf9i9ovZZMcbq8OPM68ILar2sH9hVe+Ta4p+6jVpvD/nV5Mqf5FTe5AR+YJ5ILagnn+UGoQ6g5HF+XR/PtNWdgbzkgqyHgLI9BeRAM8juUnS+mNQZlpUPT3mIaLeEq6UxYBMAeUDqpVJV543qdXs7d12omPC9SF5ekqMRcs4+Sp5ELQkxTXq0E6kLhZXhJutDlNwCeLrAa3hPihUzuBHFfBjNpnwt8Nby3RAae6EFMhgxvYpK8EMuyFAQnfzv2ldm4LeeF48BquI8Ma8KlNZTq4L5HWzNEHc2TL8ee1Wphk8xo+bdXsdO2fzyNXCgzo5/rTZbtwxaikeTZfKNmH6CVBvcMrIb3hJxKMJy1Jm1JzvJAGRf3lsj0+7fFasbl05UvDh5GF24FLZN/zMkHTxj1ZMGddZOrll3XarHYZv32MSuqp5ILqh5avhKiCxnps7qVTTRzBwGshgAAAAAAQAKrIQAAAAAAkEAaAgAAAAAAyX1KQ3NcENOetvs7WbIeAAAAAABsxENYDfX5pHwZsuwZAAAAAAB4MO5TGqaPb2kw12mTZlSffN9wuUkAAAAAALBlHsBqmD6Ti/wCAAAAAIC9AsNQAAAAAACABNIQAAAAAABIHk4adn+MMU4ZAAAAAGCfeBBpmD6+Kua1+ah8eZG6aLcgEAEAAAAA9oKHshpiHUYAAAAAgL3jYaSh8a030TPFKV+YfHfrtwMAAAAAgCQ8iDQ0zV+KUn17nJX7AAAAAABgH3i4YSgAAAAAAGDPgDQEAAAAAAASSEMAAAAAACB5EGl4d6fLTwAAAAAAYH+4f2loGq0fE/kZAAAAAADsEfcpDc1x4eIiddlrzBUlU/ysysMAAAAAAGA/eIgOZS1THHzEzDUAAAAAAPtGarFYXF1dvXv3jnZSqfh/fbur/z579ox9AAAAAAAA+wxGKAMAAAAAAAmkIQAAAAAAkEAaAgAAAAAACaQhAAAAAACQQBoCAAAAAAAJpCEAAAAAAJBAGgIAAAAAAAmkIQAAAAAA4CjK/x8dSnubxbUSYgAAAABJRU5ErkJggg==)
由于虚拟机还没启动,所以VIRTUAL类型是禁用的
根据时钟type新建一个timerlist插入到main_loop_tlg.tl里面

TimerList结构如下

Timerlist也有对应的回调函数和回调参数,这里也把timer_list插入到了clock的timerlist里面
所有定时器列表不仅可以从main-loop_Tlg里面找,也可以从clock里面找
获取时钟时间
获取时钟上的时间用的是qemu-clock-get-ns
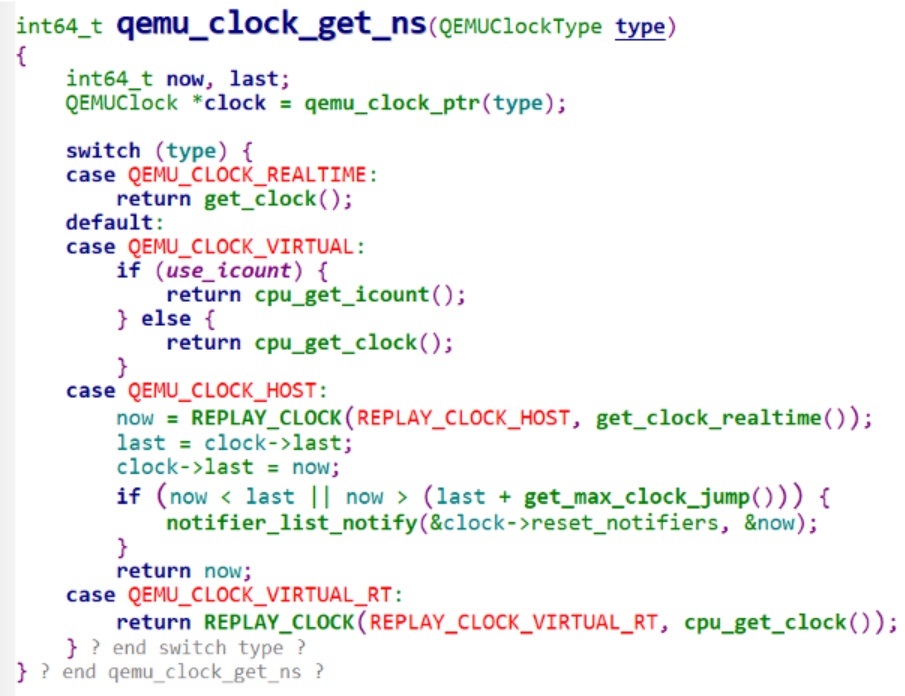
realtime就是开机后的时间,调用物理机的函数获得的

Virtual就是从vcpu处获得时间,除以进率就行

Qemu事件循环机制
qemu的事件循环是基于glib的,然后qemu利用g_source_attach添加了一个新的事件源AioContext
glib使用一个GMainLoop表示一个事件循环。每个GMainLoop都有一个主上下文GMainContext
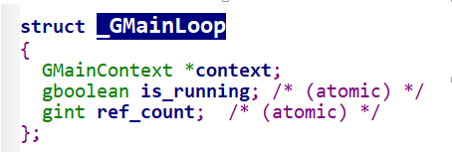
g_main_loop_new创建一个GMainLoop对象
1 | GMainLoop * |
如果不提供context,就会用默认的context,同时增加对context的引用
g_new0就是封装的malloc

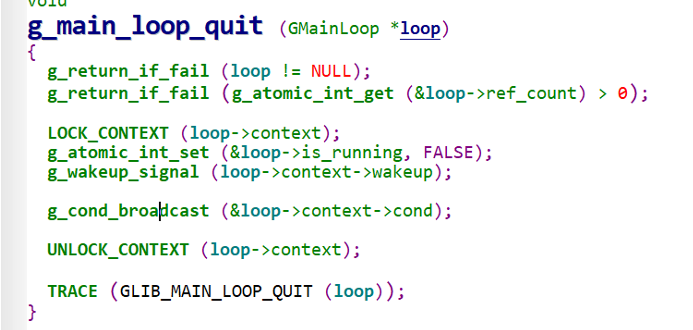
然后重点关注下loop run
这里的while是loop的主循环,其以is_running为循环条件,所以quit就是把其设置成false
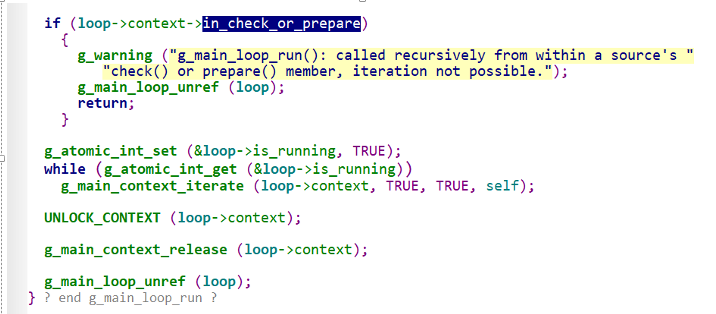
Main_loop总共分为四个步骤prepare query check dispatch
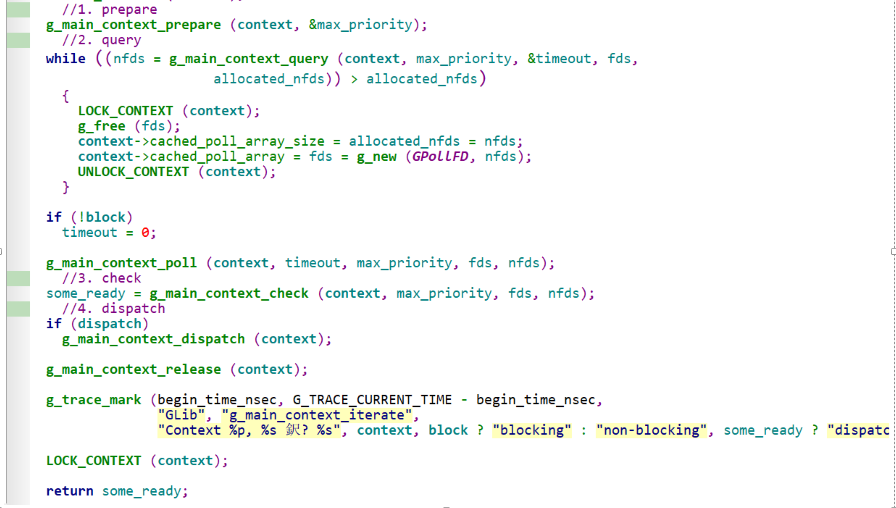
glib的事件循环核心是poll,poll涉及到IO模式,poll相关知识可以看下文
Linux IO模式及 select、poll、epoll详解 - SegmentFault 思否
在linux中,默认情况下所有的socket都是blocking的,当用户进程调用了recvfrom之后,kernel就开始了IO的第一个阶段
准备数据,即等待数据到来,等到数据到达之后(拷贝到内核的缓冲区中),再进入第二阶段
内核将数据再拷贝到用户进程中,此时readfrom才会返回
这种默认的socket IO模式就是阻塞模式,进程在调用recv之后就会卡住等待数据返回
socket还可以被设置成非阻塞模式,这样recv之后如果数据还没准备好,就会直接返回error
因此用户进程需要不断地轮询
IO多路复用,select和epoll,是指单个process可以同时处理多个网络连接的IO,原理是select poll epoll这个function会不断的轮询所负责的所有的socket,当某个socket有数据到达了,就通知用户进程
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
这里非阻塞socket一样是同步IO,随着其准备数据阶段完成之后,还需要拷贝数据到用户空间,这一切仍然是要等待的
异步IO是指,调用完recv的那一刻之后,进程就不再管了,
poll的标准代码看这篇博客
IO多路复用之poll总结 - Rabbit_Dale - 博客园 (cnblogs.com)
再回头看loop的四个阶段,核心就是poll
Prepare 阶段:通过调用事件对应的prepare回调函数,做一些准备工作,如果事件已经准备好进行监听了,就返回True
Query 是获得实际需要调用的文件fd
check是 当query获得了需要监听的fd之后,就会调用poll对fd进行监听,当poll返回时,结果会传递给主循环
dispatch时通过g_main_context_check将poll的结果传递给主循环
分析一个echo例子
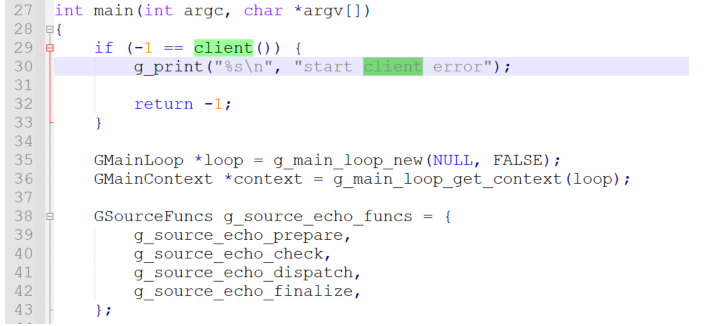
g_main_loop_new新建一个事件循环
定义一下echo 事件源的相关回调函数
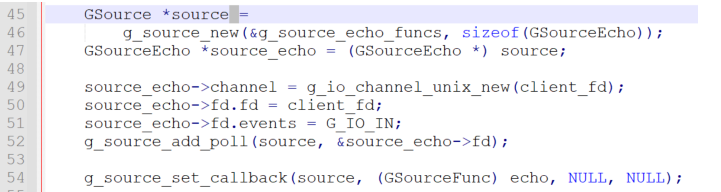
g_source_new是新建事件源,关键在于g_source_add_poll是把这个事件源对应的fd跟事件源挂钩,
Set_callback 是给source挂钩上callback函数
事件源只是glib做的一个包装,其本体还是fd,GSource结构如下
g_source_attach把事件源挂钩到context上,context是事件循环的上下文,挂到context里,才能在循环中检测事件源
而对事件源的检测实际就是将其fd加到poll里,分析下着这个例子中loop经过的四个阶段
prepare不需要做什么
check是在query之后了,此时已经poll完了
dispatch调用回调函数
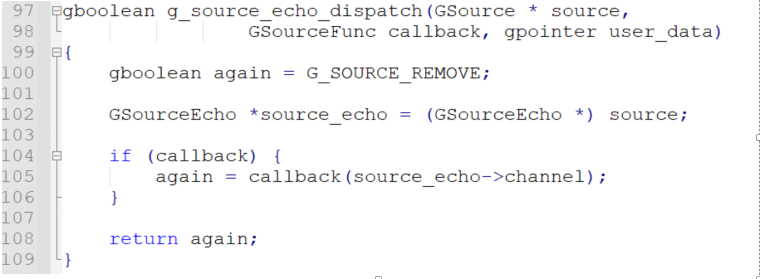
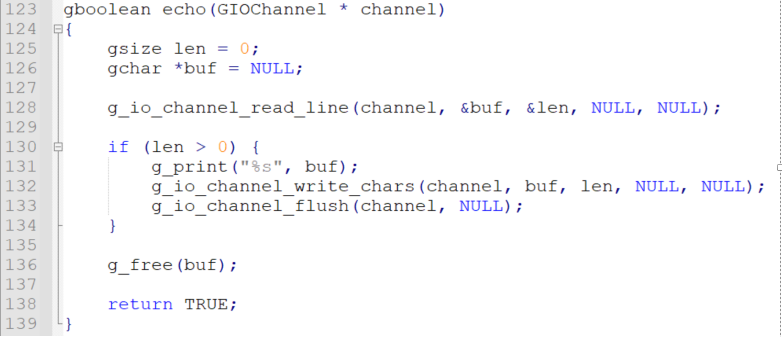
echo函数就是从channel中读出信息然后打印出来
QemuBH
bh是下半部
bh给qemu内部其他模块提供一个异步延迟调用的功能,类似于Windows上的APC?
其结构体如下
1 | struct QEMUBH { |
这里是老版本的QEMUBH,新建bh需要三个参数,挂到哪个context上,bh回调函数以及参数opaque
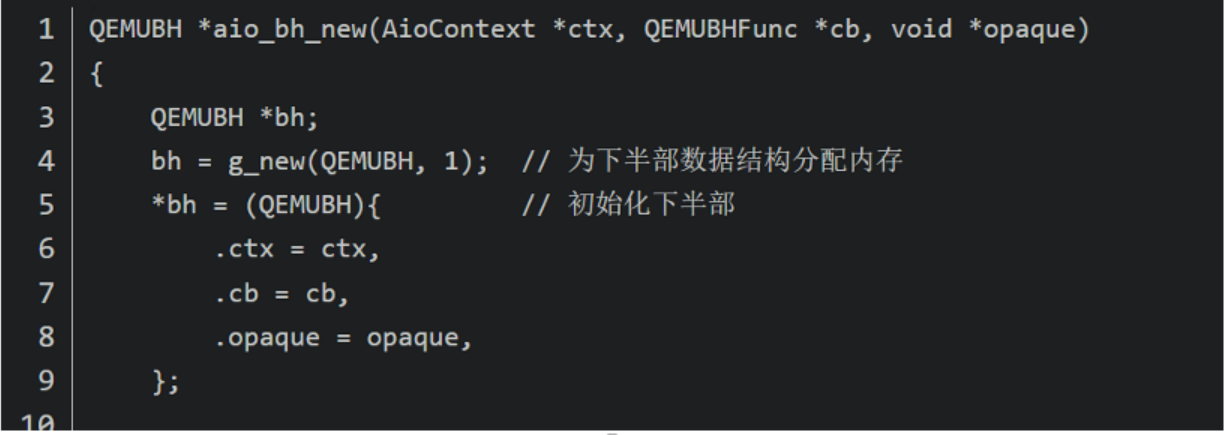
bh被挂载到context之后并不会立即执行,只有当事件循环的poll中有fd准备好后才会触发到bh,
由于fd一直没准备好,bh就会被一直卡着不执行,所以qemu留了对bh的调度接口,用于通知事件循环调度bh,这个主动调度接口是用event_notifier,,将EventNotifier中的rfd设置为事件循环要监听的fd,然后主动通知只要向EventNotiifer中的rfd写入内容,事件循环的poll就会有响应了,然后就能触发bh
delete是既设置schedule为0,让其不被调度,又设置delete为1,让下次dispatch时把他删了
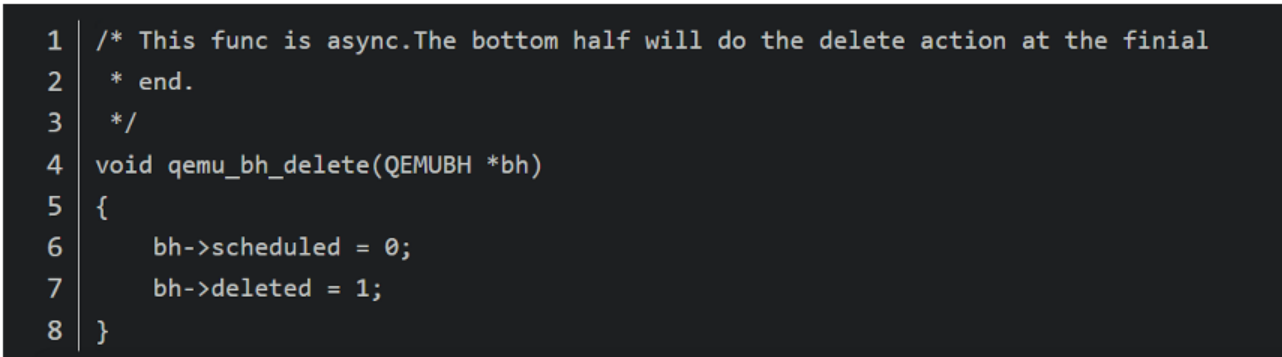
禁用bh就是设置
Refs
(24条消息) qemu2 时钟系统分析_TangGeeA的博客-CSDN博客_qemu timer
Linux IO模式及 select、poll、epoll详解 - SegmentFault 思否
IO多路复用之poll总结 - Rabbit_Dale - 博客园 (cnblogs.com)
Stefan Hajnoczi: QEMU Internals: Overall architecture and threading model (vmsplice.net)